 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApprenticeship Bootstrapping Via Deep Learning with a Safety Net for UAV-UGV Interaction
Paper and Code
Oct 10, 2018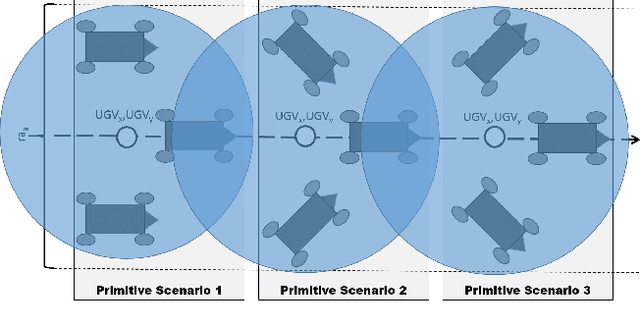
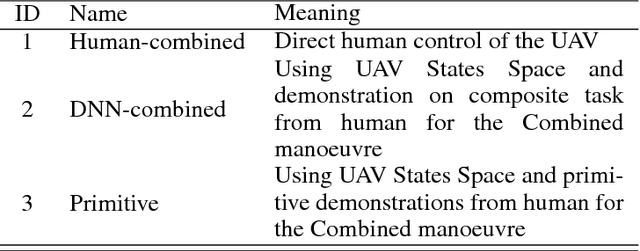
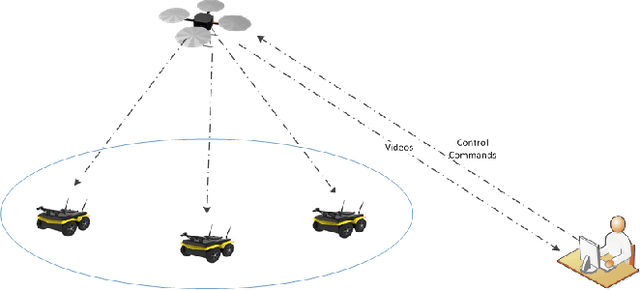
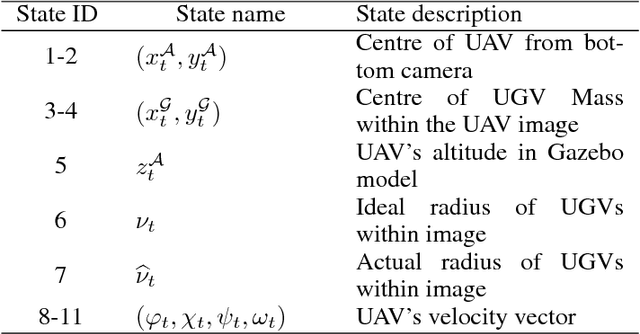
In apprenticeship learning (AL), agents learn by watching or acquiring human demonstrations on some tasks of interest. However, the lack of human demonstrations in novel tasks where they may not be a human expert yet, or when it is too expensive and/or time consuming to acquire human demonstrations motivated a new algorithm: Apprenticeship bootstrapping (ABS). The basic idea is to learn from demonstrations on sub-tasks then autonomously bootstrap a model on the main, more complex, task. The original ABS used inverse reinforcement learning (ABS-IRL). However, the approach is not suitable for continuous action spaces. In this paper, we propose ABS via Deep learning (ABS-DL). It is first validated in a simulation environment on an aerial and ground coordination scenario, where an Unmanned Aerial Vehicle (UAV) is required to maintain three Unmanned Ground Vehicles (UGVs) within a field of view of the UAV 's camera (FoV). Moving a machine learning algorithm from a simulation environment to an actual physical platform is challenging because `mistakes' made by the algorithm while learning could lead to the damage of the platform. We then take this extra step to test the algorithm in a physical environment. We propose a safety-net as a protection layer to ensure that the autonomy of the algorithm in learning does not compromise the safety of the platform. The tests of ABS-DL in the real environment can guarantee a damage-free, collision avoidance behaviour of autonomous bodies. The results show that performance of the proposed approach is comparable to that of a human, and competitive to the traditional approach using expert demonstrations performed on the composite task. The proposed safety-net approach demonstrates its advantages when it enables the UAV to operate more safely under the control of the ABS-DL algorithm.