 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Language-Guided Abstraction from Contrastive Explanations
Paper and Code
Sep 12, 2024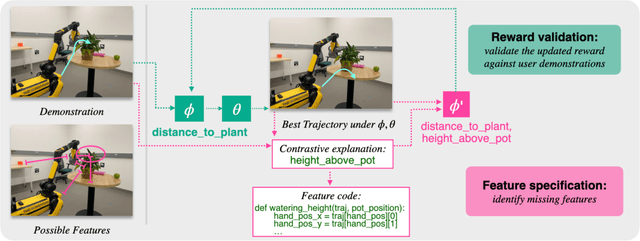
Many approaches to robot learning begin by inferring a reward function from a set of human demonstrations. To learn a good reward, it is necessary to determine which features of the environment are relevant before determining how these features should be used to compute reward. End-to-end methods for joint feature and reward learning (e.g., using deep networks or program synthesis techniques) often yield brittle reward functions that are sensitive to spurious state features. By contrast, humans can often generalizably learn from a small number of demonstrations by incorporating strong priors about what features of a demonstration are likely meaningful for a task of interest. How do we build robots that leverage this kind of background knowledge when learning from new demonstrations? This paper describes a method named ALGAE (Adaptive Language-Guided Abstraction from [Contrastive] Explanations) which alternates between using language models to iteratively identify human-meaningful features needed to explain demonstrated behavior, then standard inverse reinforcement learning techniques to assign weights to these features. Experiments across a variety of both simulated and real-world robot environments show that ALGAE learns generalizable reward functions defined on interpretable features using only small numbers of demonstrations. Importantly, ALGAE can recognize when features are missing, then extract and define those features without any human input -- making it possible to quickly and efficiently acquire rich representations of user behavior.