Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge2nd Place Solution for Waymo Open Dataset Challenge -- 2D Object Detection
Paper and Code
Jun 28, 2020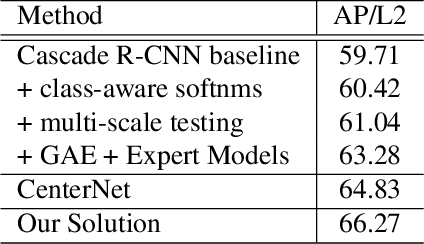
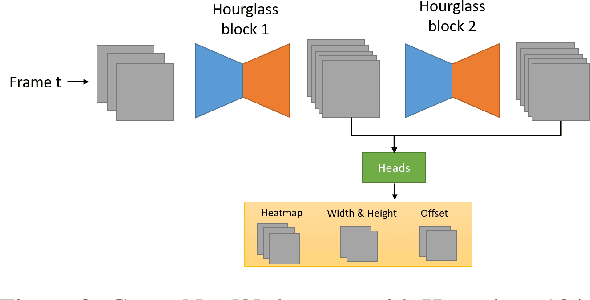
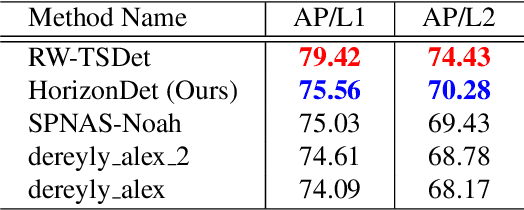
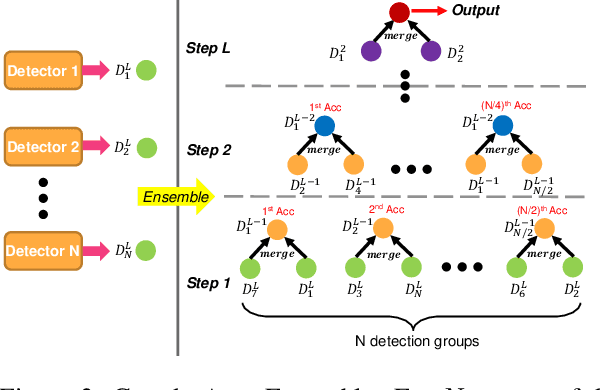
A practical autonomous driving system urges the need to reliably and accurately detect vehicles and persons. In this report, we introduce a state-of-the-art 2D object detection system for autonomous driving scenarios. Specifically, we integrate both popular two-stage detector and one-stage detector with anchor free fashion to yield a robust detection. Furthermore, we train multiple expert models and design a greedy version of the auto ensemble scheme that automatically merges detections from different models. Notably, our overall detection system achieves 70.28 L2 mAP on the Waymo Open Dataset v1.2, ranking the 2nd place in the 2D detection track of the Waymo Open Dataset Challenges.
View paper on