Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge1st Place Solutions for Waymo Open Dataset Challenges - 2D and 3D Tracking
Paper and Code
Jun 28, 2020
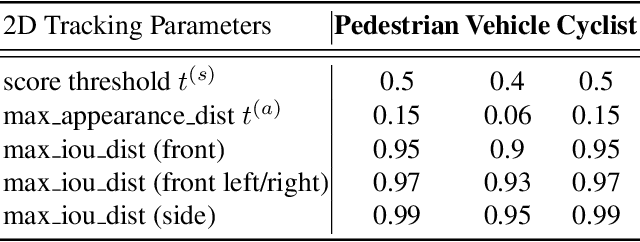
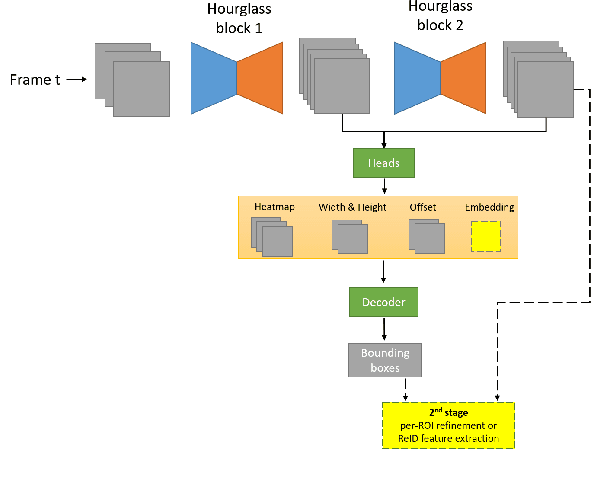
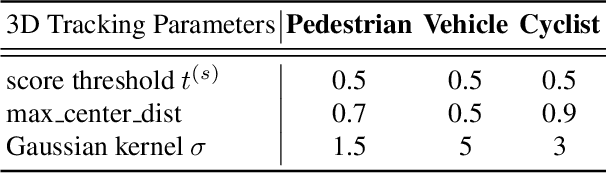
This technical report presents the online and real-time 2D and 3D multi-object tracking (MOT) algorithms that reached the 1st places on both Waymo Open Dataset 2D tracking and 3D tracking challenges. An efficient and pragmatic online tracking-by-detection framework named HorizonMOT is proposed for camera-based 2D tracking in the image space and LiDAR-based 3D tracking in the 3D world space. Within the tracking-by-detection paradigm, our trackers leverage our high-performing detectors used in the 2D/3D detection challenges and achieved 45.13% 2D MOTA/L2 and 63.45% 3D MOTA/L2 in the 2D/3D tracking challenges.
View paper on