 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA More Advanced Group Polarization Measurement Approach Based on LLM-Based Agents and Graphs
Nov 19, 2024



Group polarization is an important research direction in social media content analysis, attracting many researchers to explore this field. Therefore, how to effectively measure group polarization has become a critical topic. Measuring group polarization on social media presents several challenges that have not yet been addressed by existing solutions. First, social media group polarization measurement involves processing vast amounts of text, which poses a significant challenge for information extraction. Second, social media texts often contain hard-to-understand content, including sarcasm, memes, and internet slang. Additionally, group polarization research focuses on holistic analysis, while texts is typically fragmented. To address these challenges, we designed a solution based on a multi-agent system and used a graph-structured Community Sentiment Network (CSN) to represent polarization states. Furthermore, we developed a metric called Community Opposition Index (COI) based on the CSN to quantify polarization. Finally, we tested our multi-agent system through a zero-shot stance detection task and achieved outstanding results. In summary, the proposed approach has significant value in terms of usability, accuracy, and interpretability.
OccLoff: Learning Optimized Feature Fusion for 3D Occupancy Prediction
Nov 06, 2024



3D semantic occupancy prediction is crucial for finely representing the surrounding environment, which is essential for ensuring the safety in autonomous driving. Existing fusion-based occupancy methods typically involve performing a 2D-to-3D view transformation on image features, followed by computationally intensive 3D operations to fuse these with LiDAR features, leading to high computational costs and reduced accuracy. Moreover, current research on occupancy prediction predominantly focuses on designing specific network architectures, often tailored to particular models, with limited attention given to the more fundamental aspect of semantic feature learning. This gap hinders the development of more transferable methods that could enhance the performance of various occupancy models. To address these challenges, we propose OccLoff, a framework that Learns to Optimize Feature Fusion for 3D occupancy prediction. Specifically, we introduce a sparse fusion encoder with entropy masks that directly fuses 3D and 2D features, improving model accuracy while reducing computational overhead. Additionally, we propose a transferable proxy-based loss function and an adaptive hard sample weighting algorithm, which enhance the performance of several state-of-the-art methods. Extensive evaluations on the nuScenes and SemanticKITTI benchmarks demonstrate the superiority of our framework, and ablation studies confirm the effectiveness of each proposed module.
Using fine-tuning and min lookahead beam search to improve Whisper
Sep 19, 2023



The performance of Whisper in low-resource languages is still far from perfect. In addition to a lack of training data on low-resource languages, we identify some limitations in the beam search algorithm used in Whisper. To address these issues, we fine-tune Whisper on additional data and propose an improved decoding algorithm. On the Vietnamese language, fine-tuning Whisper-Tiny with LoRA leads to an improvement of 38.49 in WER over the zero-shot Whisper-Tiny setting which is a further reduction of 1.45 compared to full-parameter fine-tuning. Additionally, by using Filter-Ends and Min Lookahead decoding algorithms, the WER reduces by 2.26 on average over a range of languages compared to standard beam search. These results generalise to larger Whisper model sizes. We also prove a theorem that Min Lookahead outperforms the standard beam search algorithm used in Whisper.
Programmable Neural Network Trojan for Pre-Trained Feature Extractor
Jan 23, 2019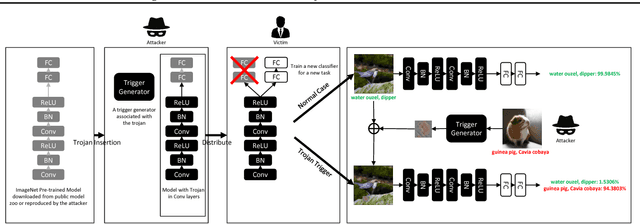
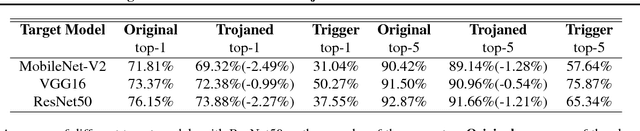
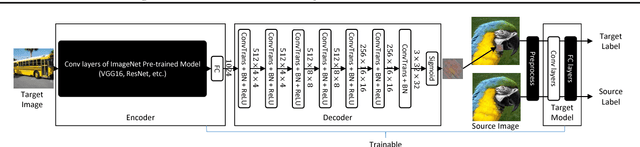
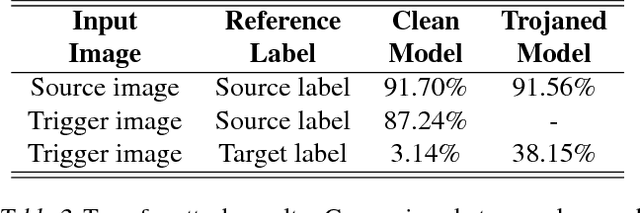
Neural network (NN) trojaning attack is an emerging and important attack model that can broadly damage the system deployed with NN models. Existing studies have explored the outsourced training attack scenario and transfer learning attack scenario in some small datasets for specific domains, with limited numbers of fixed target classes. In this paper, we propose a more powerful trojaning attack method for both outsourced training attack and transfer learning attack, which outperforms existing studies in the capability, generality, and stealthiness. First, The attack is programmable that the malicious misclassification target is not fixed and can be generated on demand even after the victim's deployment. Second, our trojan attack is not limited in a small domain; one trojaned model on a large-scale dataset can affect applications of different domains that reuse its general features. Thirdly, our trojan design is hard to be detected or eliminated even if the victims fine-tune the whole model.