 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReconfigurable Holographic Surface Aided Wireless Simultaneous Localization and Mapping
Jan 16, 2024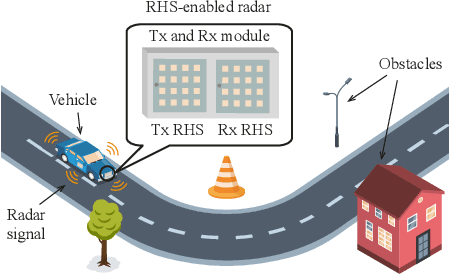
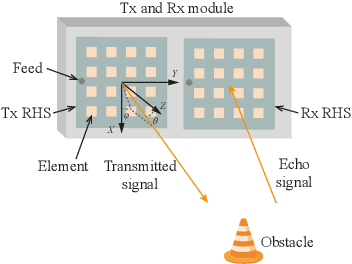
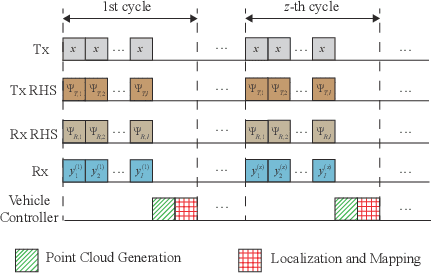
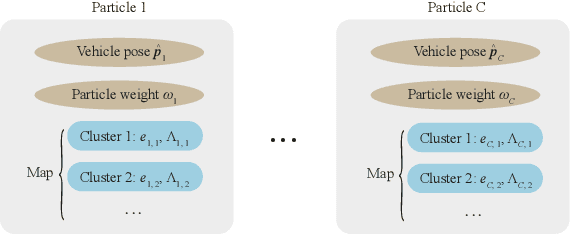
As a crucial facilitator of future autonomous driving applications, wireless simultaneous localization and mapping (SLAM) has drawn growing attention recently. However, the accuracy of existing wireless SLAM schemes is limited because the antenna gain is constrained given the cost budget due to the expensive hardware components such as phase arrays. To address this issue, we propose a reconfigurable holographic surface (RHS)-aided SLAM system in this paper. The RHS is a novel type of low-cost antenna that can cut down the hardware cost by replacing phased arrays in conventional SLAM systems. However, compared with a phased array where the phase shifts of parallelfed signals are adjusted, the RHS exhibits a different radiation model because its amplitude-controlled radiation elements are series-fed by surface waves, implying that traditional schemes cannot be applied directly. To address this challenge, we propose an RHS-aided beam steering method for sensing the surrounding environment and design the corresponding SLAM algorithm. Simulation results show that the proposed scheme can achieve more than there times the localization accuracy that traditional wireless SLAM with the same cost achieves.
Wireless Indoor Simultaneous Localization and Mapping Using Reconfigurable Intelligent Surface
Jul 04, 2021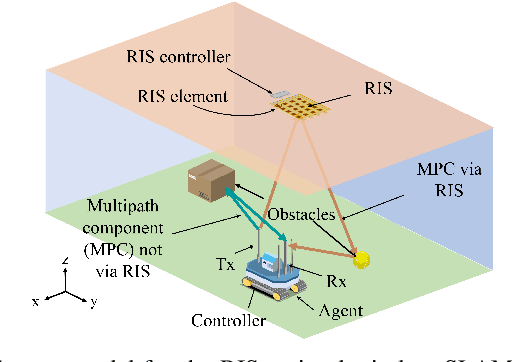
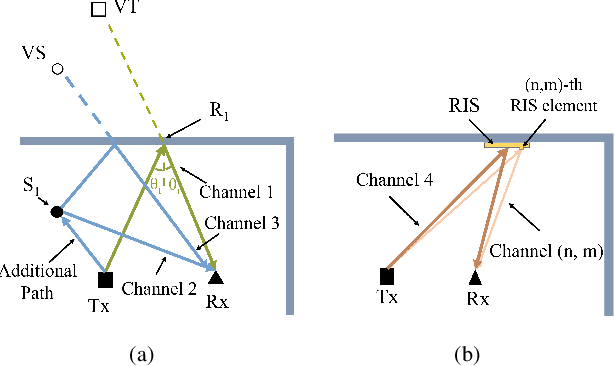
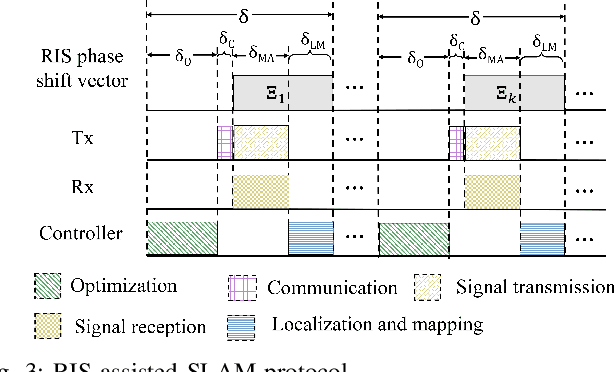
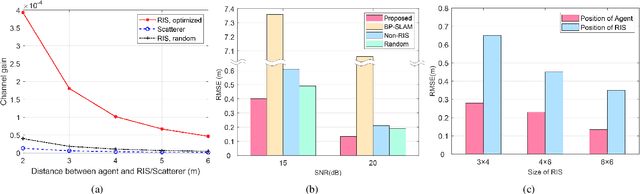
Indoor wireless simultaneous localization and mapping (SLAM) is considered as a promising technique to provide positioning services in future 6G systems. However, the accuracy of traditional wireless SLAM system heavily relies on the quality of propagation paths, which is limited by the uncontrollable wireless environment. In this paper, we propose a novel SLAM system assisted by a reconfigurable intelligent surface (RIS) to address this issue. By configuring the phase shifts of the RIS, the strength of received signals can be enhanced to resist the disturbance of noise. However, the selection of phase shifts heavily influences the localization and mapping phase, which makes the design very challenging. To tackle this challenge, we formulate the RIS-assisted indoor SLAM optimization problem and design an error minimization algorithm for it. Simulations show that the RIS assisted SLAM system can decrease the positioning error by at least 31% compared with benchmark schemes.
Supervised Contrastive Learning for Accented Speech Recognition
Jul 02, 2021
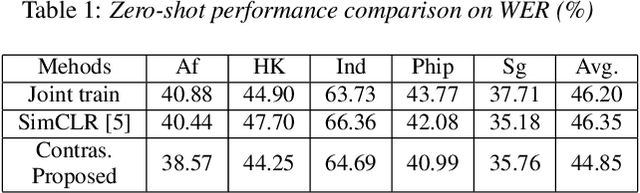


Neural network based speech recognition systems suffer from performance degradation due to accented speech, especially unfamiliar accents. In this paper, we study the supervised contrastive learning framework for accented speech recognition. To build different views (similar "positive" data samples) for contrastive learning, three data augmentation techniques including noise injection, spectrogram augmentation and TTS-same-sentence generation are further investigated. From the experiments on the Common Voice dataset, we have shown that contrastive learning helps to build data-augmentation invariant and pronunciation invariant representations, which significantly outperforms traditional joint training methods in both zero-shot and full-shot settings. Experiments show that contrastive learning can improve accuracy by 3.66% (zero-shot) and 3.78% (full-shot) on average, comparing to the joint training method.