 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVeniBot: Towards Autonomous Venipuncture with Semi-supervised Vein Segmentation from Ultrasound Images
May 27, 2021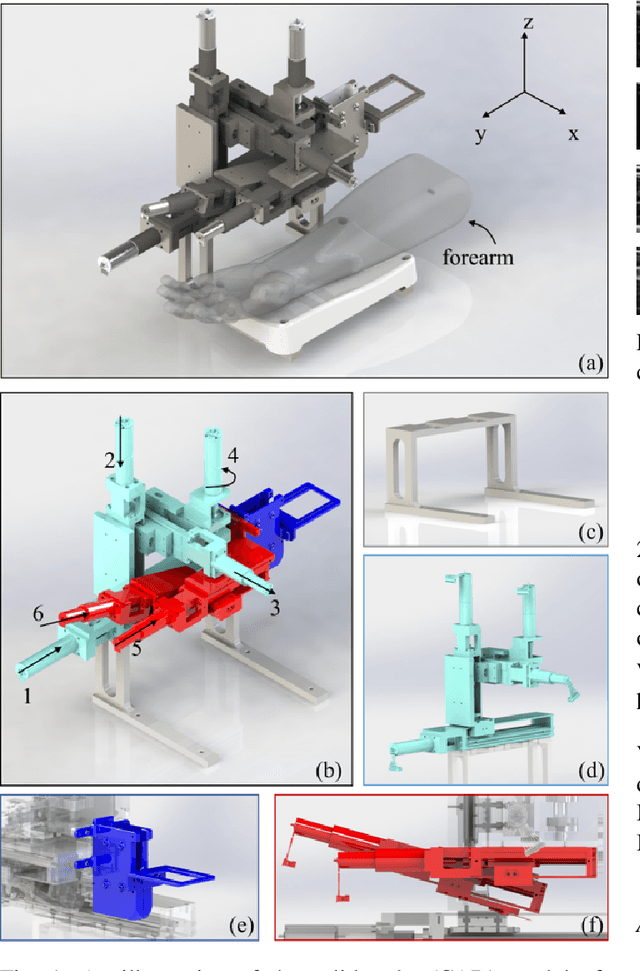
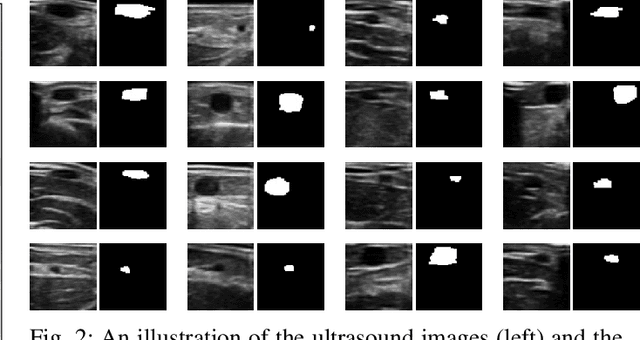
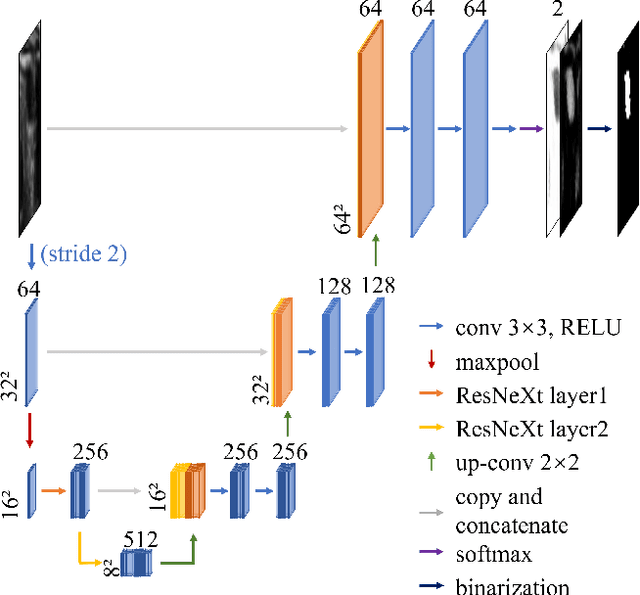
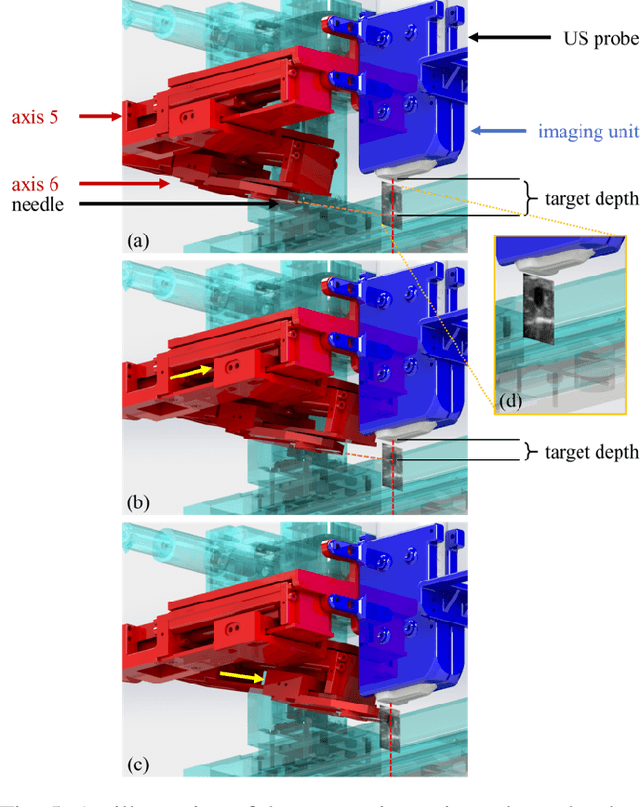
In the modern medical care, venipuncture is an indispensable procedure for both diagnosis and treatment. In this paper, unlike existing solutions that fully or partially rely on professional assistance, we propose VeniBot -- a compact robotic system solution integrating both novel hardware and software developments. For the hardware, we design a set of units to facilitate the supporting, positioning, puncturing and imaging functionalities. For the software, to move towards a full automation, we propose a novel deep learning framework -- semi-ResNeXt-Unet for semi-supervised vein segmentation from ultrasound images. From which, the depth information of vein is calculated and used to enable automated navigation for the puncturing unit. VeniBot is validated on 40 volunteers, where ultrasound images can be collected successfully. For the vein segmentation validation, the proposed semi-ResNeXt-Unet improves the dice similarity coefficient (DSC) by 5.36%, decreases the centroid error by 1.38 pixels and decreases the failure rate by 5.60%, compared to fully-supervised ResNeXt-Unet.