 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvancing the Control of Low-Altitude Wireless Networks: Architecture, Design Principles, and Future Directions
Aug 11, 2025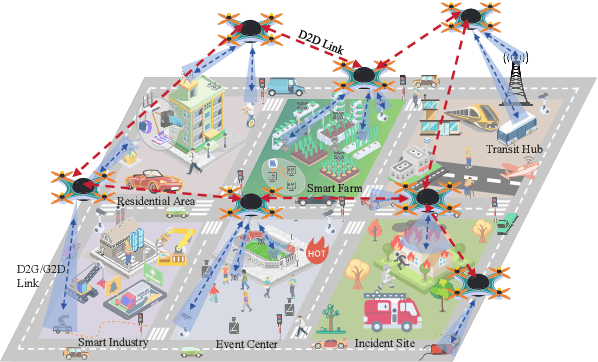

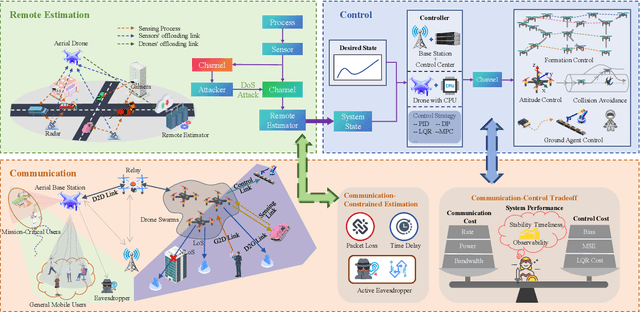
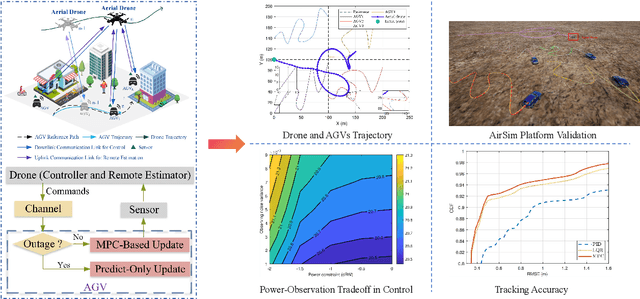
This article introduces a control-oriented low-altitude wireless network (LAWN) that integrates near-ground communications and remote estimation of the internal system state. This integration supports reliable networked control in dynamic aerial-ground environments. First, we introduce the network's modular architecture and key performance metrics. Then, we discuss core design trade-offs across the control, communication, and estimation layers. A case study illustrates closed-loop coordination under wireless constraints. Finally, we outline future directions for scalable, resilient LAWN deployments in real-time and resource-constrained scenarios.
Grounding Bodily Awareness in Visual Representations for Efficient Policy Learning
May 24, 2025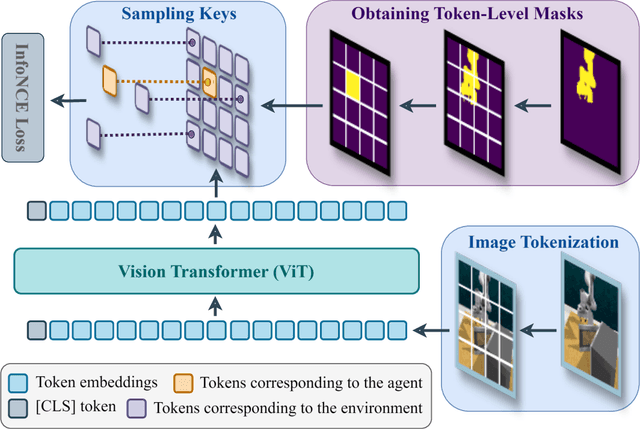
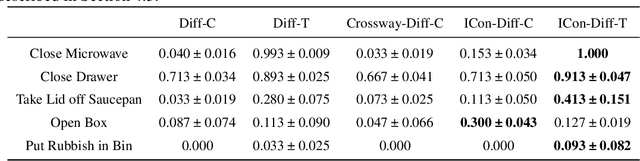
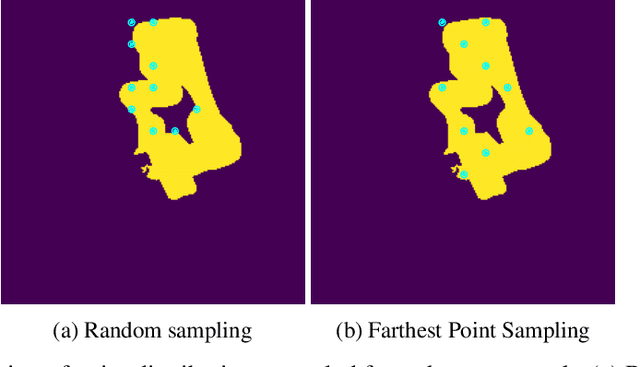
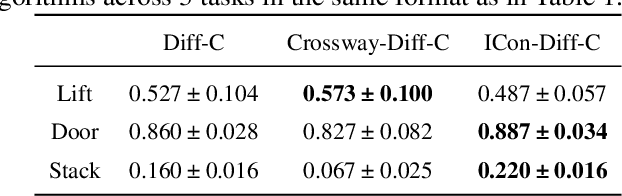
Learning effective visual representations for robotic manipulation remains a fundamental challenge due to the complex body dynamics involved in action execution. In this paper, we study how visual representations that carry body-relevant cues can enable efficient policy learning for downstream robotic manipulation tasks. We present $\textbf{I}$nter-token $\textbf{Con}$trast ($\textbf{ICon}$), a contrastive learning method applied to the token-level representations of Vision Transformers (ViTs). ICon enforces a separation in the feature space between agent-specific and environment-specific tokens, resulting in agent-centric visual representations that embed body-specific inductive biases. This framework can be seamlessly integrated into end-to-end policy learning by incorporating the contrastive loss as an auxiliary objective. Our experiments show that ICon not only improves policy performance across various manipulation tasks but also facilitates policy transfer across different robots. The project website: https://github.com/HenryWJL/icon
Optimal Spatial-Temporal Triangulation for Bearing-Only Cooperative Motion Estimation
Oct 29, 2023Vision-based cooperative motion estimation is an important problem for many multi-robot systems such as cooperative aerial target pursuit. This problem can be formulated as bearing-only cooperative motion estimation, where the visual measurement is modeled as a bearing vector pointing from the camera to the target. The conventional approaches for bearing-only cooperative estimation are mainly based on the framework distributed Kalman filtering (DKF). In this paper, we propose a new optimal bearing-only cooperative estimation algorithm, named spatial-temporal triangulation, based on the method of distributed recursive least squares, which provides a more flexible framework for designing distributed estimators than DKF. The design of the algorithm fully incorporates all the available information and the specific triangulation geometric constraint. As a result, the algorithm has superior estimation performance than the state-of-the-art DKF algorithms in terms of both accuracy and convergence speed as verified by numerical simulation. We rigorously prove the exponential convergence of the proposed algorithm. Moreover, to verify the effectiveness of the proposed algorithm under practical challenging conditions, we develop a vision-based cooperative aerial target pursuit system, which is the first of such fully autonomous systems so far to the best of our knowledge.
A Novel Exploitative and Explorative GWO-SVM Algorithm for Smart Emotion Recognition
Jan 05, 2023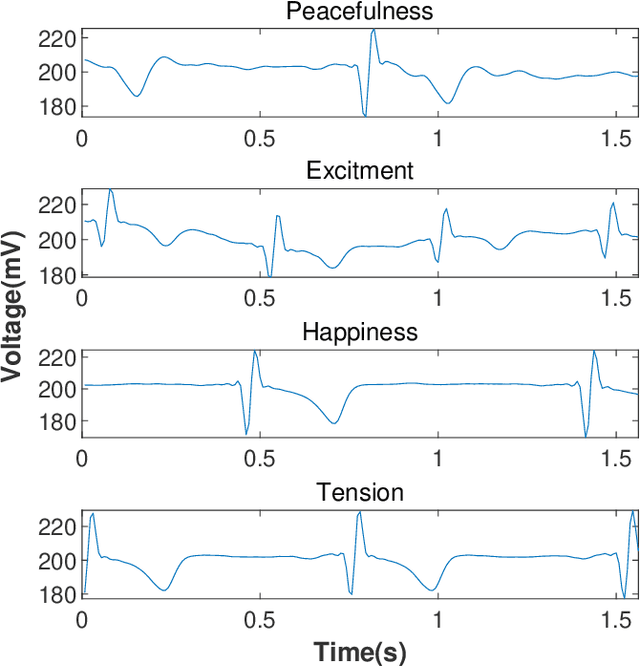
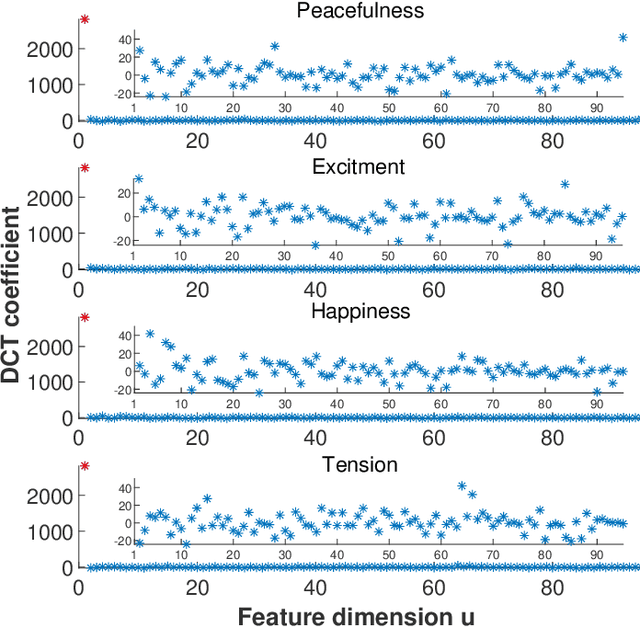
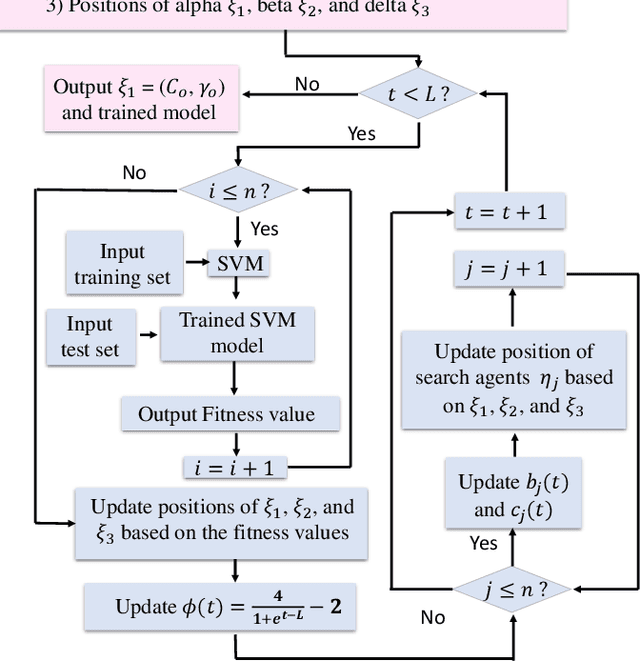
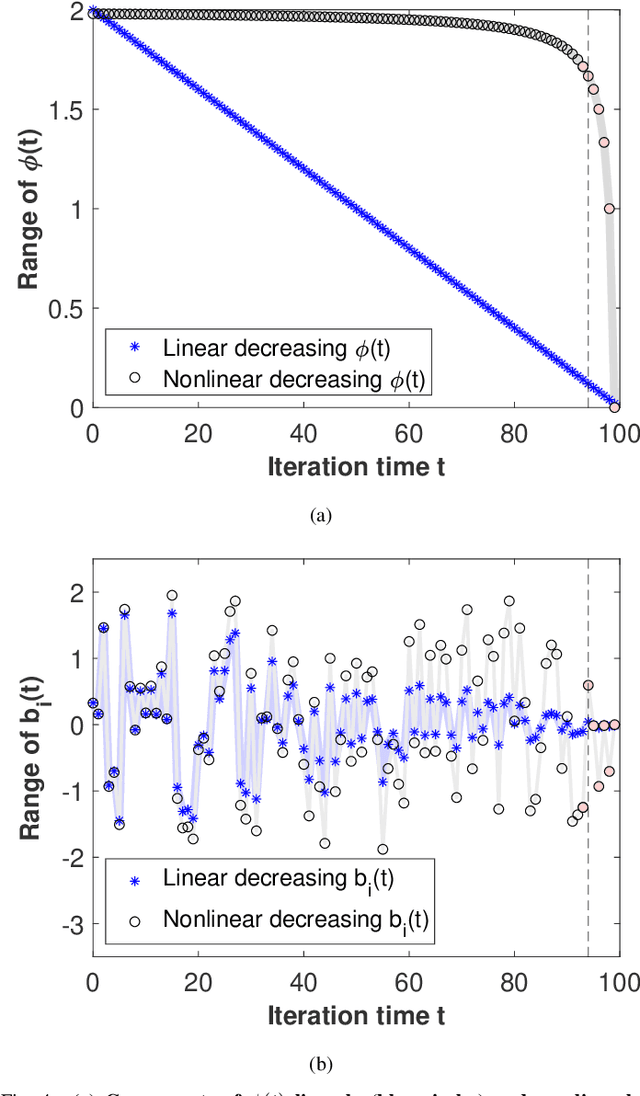
Emotion recognition or detection is broadly utilized in patient-doctor interactions for diseases such as schizophrenia and autism and the most typical techniques are speech detection and facial recognition. However, features extracted from these behavior-based emotion recognitions are not reliable since humans can disguise their emotions. Recording voices or tracking facial expressions for a long term is also not efficient. Therefore, our aim is to find a reliable and efficient emotion recognition scheme, which can be used for non-behavior-based emotion recognition in real-time. This can be solved by implementing a single-channel electrocardiogram (ECG) based emotion recognition scheme in a lightweight embedded system. However, existing schemes have relatively low accuracy. Therefore, we propose a reliable and efficient emotion recognition scheme - exploitative and explorative grey wolf optimizer based SVM (X - GWO - SVM) for ECG-based emotion recognition. Two datasets, one raw self-collected iRealcare dataset, and the widely-used benchmark WESAD dataset are used in the X - GWO - SVM algorithm for emotion recognition. This work demonstrates that the X - GWO - SVM algorithm can be used for emotion recognition and the algorithm exhibits superior performance in reliability compared to the use of other supervised machine learning methods in earlier works. It can be implemented in a lightweight embedded system, which is much more efficient than existing solutions based on deep neural networks.