 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBoundary and Position Information Mining for Aerial Small Object Detection
Jan 23, 2026Unmanned Aerial Vehicle (UAV) applications have become increasingly prevalent in aerial photography and object recognition. However, there are major challenges to accurately capturing small targets in object detection due to the imbalanced scale and the blurred edges. To address these issues, boundary and position information mining (BPIM) framework is proposed for capturing object edge and location cues. The proposed BPIM includes position information guidance (PIG) module for obtaining location information, boundary information guidance (BIG) module for extracting object edge, cross scale fusion (CSF) module for gradually assembling the shallow layer image feature, three feature fusion (TFF) module for progressively combining position and boundary information, and adaptive weight fusion (AWF) module for flexibly merging the deep layer semantic feature. Therefore, BPIM can integrate boundary, position, and scale information in image for small object detection using attention mechanisms and cross-scale feature fusion strategies. Furthermore, BPIM not only improves the discrimination of the contextual feature by adaptive weight fusion with boundary, but also enhances small object perceptions by cross-scale position fusion. On the VisDrone2021, DOTA1.0, and WiderPerson datasets, experimental results show the better performances of BPIM compared to the baseline Yolov5-P2, and obtains the promising performance in the state-of-the-art methods with comparable computation load.
Understanding and Improving Proximity Graph based Maximum Inner Product Search
Sep 30, 2019


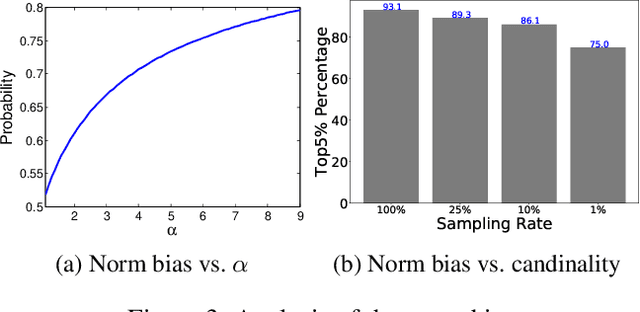
The inner-product navigable small world graph (ip-NSW) represents the state-of-the-art method for approximate maximum inner product search (MIPS) and it can achieve an order of magnitude speedup over the fastest baseline. However, to date it is still unclear where its exceptional performance comes from. In this paper, we show that there is a strong norm bias in the MIPS problem, which means that the large norm items are very likely to become the result of MIPS. Then we explain the good performance of ip-NSW as matching the norm bias of the MIPS problem - large norm items have big in-degrees in the ip-NSW proximity graph and a walk on the graph spends the majority of computation on these items, thus effectively avoids unnecessary computation on small norm items. Furthermore, we propose the ip-NSW+ algorithm, which improves ip-NSW by introducing an additional angular proximity graph. Search is first conducted on the angular graph to find the angular neighbors of a query and then the MIPS neighbors of these angular neighbors are used to initialize the candidate pool for search on the inner-product proximity graph. Experiment results show that ip-NSW+ consistently and significantly outperforms ip-NSW and provides more robust performance under different data distributions.