 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTimealign: A multi-modal object detection method for time misalignment fusing in autonomous driving
Dec 13, 2024



The multi-modal perception methods are thriving in the autonomous driving field due to their better usage of complementary data from different sensors. Such methods depend on calibration and synchronization between sensors to get accurate environmental information. There have already been studies about space-alignment robustness in autonomous driving object detection process, however, the research for time-alignment is relatively few. As in reality experiments, LiDAR point clouds are more challenging for real-time data transfer, our study used historical frames of LiDAR to better align features when the LiDAR data lags exist. We designed a Timealign module to predict and combine LiDAR features with observation to tackle such time misalignment based on SOTA GraphBEV framework.
A re-calibration method for object detection with multi-modal alignment bias in autonomous driving
May 27, 2024



Multi-modal object detection in autonomous driving has achieved great breakthroughs due to the usage of fusing complementary information from different sensors. The calibration in fusion between sensors such as LiDAR and camera is always supposed to be precise in previous work. However, in reality, calibration matrices are fixed when the vehicles leave the factory, but vibration, bumps, and data lags may cause calibration bias. As the research on the calibration influence on fusion detection performance is relatively few, flexible calibration dependency multi-sensor detection method has always been attractive. In this paper, we conducted experiments on SOTA detection method EPNet++ and proved slight bias on calibration can reduce the performance seriously. We also proposed a re-calibration model based on semantic segmentation which can be combined with a detection algorithm to improve the performance and robustness of multi-modal calibration bias.
Synthetic Datasets for Autonomous Driving: A Survey
Apr 24, 2023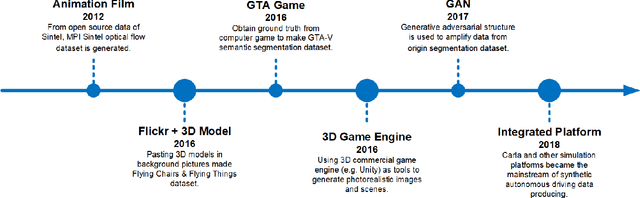

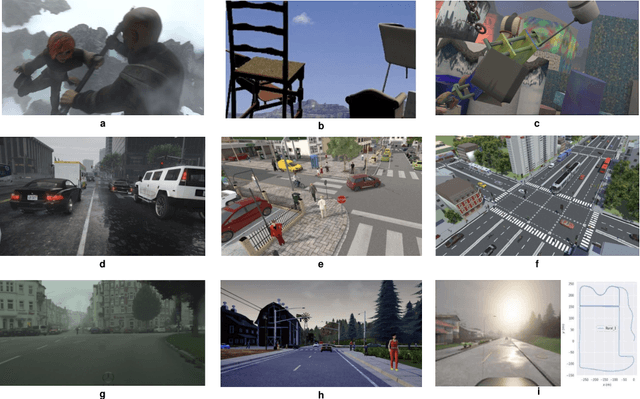

Autonomous driving techniques have been flourishing in recent years while thirsting for huge amounts of high-quality data. However, it is difficult for real-world datasets to keep up with the pace of changing requirements due to their expensive and time-consuming experimental and labeling costs. Therefore, more and more researchers are turning to synthetic datasets to easily generate rich and changeable data as an effective complement to the real world and to improve the performance of algorithms. In this paper, we summarize the evolution of synthetic dataset generation methods and review the work to date in synthetic datasets related to single and multi-task categories for to autonomous driving study. We also discuss the role that synthetic dataset plays the evaluation, gap test, and positive effect in autonomous driving related algorithm testing, especially on trustworthiness and safety aspects. Finally, we discuss general trends and possible development directions. To the best of our knowledge, this is the first survey focusing on the application of synthetic datasets in autonomous driving. This survey also raises awareness of the problems of real-world deployment of autonomous driving technology and provides researchers with a possible solution.