 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJailbreak Foundry: From Papers to Runnable Attacks for Reproducible Benchmarking
Mar 05, 2026Jailbreak techniques for large language models (LLMs) evolve faster than benchmarks, making robustness estimates stale and difficult to compare across papers due to drift in datasets, harnesses, and judging protocols. We introduce JAILBREAK FOUNDRY (JBF), a system that addresses this gap via a multi-agent workflow to translate jailbreak papers into executable modules for immediate evaluation within a unified harness. JBF features three core components: (i) JBF-LIB for shared contracts and reusable utilities; (ii) JBF-FORGE for the multi-agent paper-to-module translation; and (iii) JBF-EVAL for standardizing evaluations. Across 30 reproduced attacks, JBF achieves high fidelity with a mean (reproduced-reported) attack success rate (ASR) deviation of +0.26 percentage points. By leveraging shared infrastructure, JBF reduces attack-specific implementation code by nearly half relative to original repositories and achieves an 82.5% mean reused-code ratio. This system enables a standardized AdvBench evaluation of all 30 attacks across 10 victim models using a consistent GPT-4o judge. By automating both attack integration and standardized evaluation, JBF offers a scalable solution for creating living benchmarks that keep pace with the rapidly shifting security landscape.
QuantEval: A Benchmark for Financial Quantitative Tasks in Large Language Models
Jan 13, 2026Large Language Models (LLMs) have shown strong capabilities across many domains, yet their evaluation in financial quantitative tasks remains fragmented and mostly limited to knowledge-centric question answering. We introduce QuantEval, a benchmark that evaluates LLMs across three essential dimensions of quantitative finance: knowledge-based QA, quantitative mathematical reasoning, and quantitative strategy coding. Unlike prior financial benchmarks, QuantEval integrates a CTA-style backtesting framework that executes model-generated strategies and evaluates them using financial performance metrics, enabling a more realistic assessment of quantitative coding ability. We evaluate some state-of-the-art open-source and proprietary LLMs and observe substantial gaps to human experts, particularly in reasoning and strategy coding. Finally, we conduct large-scale supervised fine-tuning and reinforcement learning experiments on domain-aligned data, demonstrating consistent improvements. We hope QuantEval will facilitate research on LLMs' quantitative finance capabilities and accelerate their practical adoption in real-world trading workflows. We additionally release the full deterministic backtesting configuration (asset universe, cost model, and metric definitions) to ensure strict reproducibility.
BayesFT: Bayesian Optimization for Fault Tolerant Neural Network Architecture
Sep 30, 2022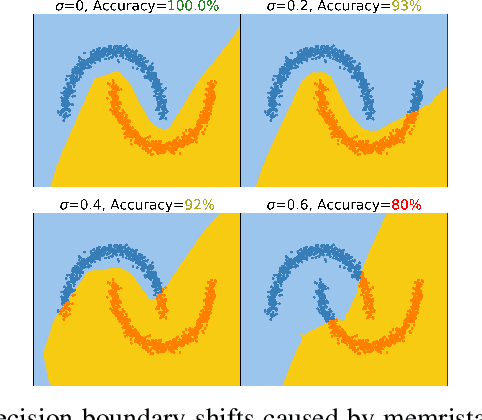
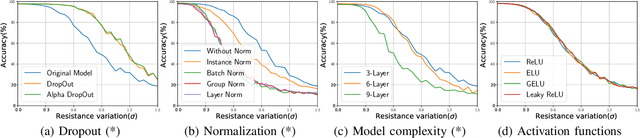
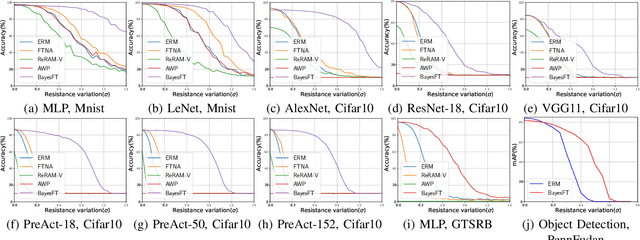

To deploy deep learning algorithms on resource-limited scenarios, an emerging device-resistive random access memory (ReRAM) has been regarded as promising via analog computing. However, the practicability of ReRAM is primarily limited due to the weight drifting of ReRAM neural networks due to multi-factor reasons, including manufacturing, thermal noises, and etc. In this paper, we propose a novel Bayesian optimization method for fault tolerant neural network architecture (BayesFT). For neural architecture search space design, instead of conducting neural architecture search on the whole feasible neural architecture search space, we first systematically explore the weight drifting tolerance of different neural network components, such as dropout, normalization, number of layers, and activation functions in which dropout is found to be able to improve the neural network robustness to weight drifting. Based on our analysis, we propose an efficient search space by only searching for dropout rates for each layer. Then, we use Bayesian optimization to search for the optimal neural architecture robust to weight drifting. Empirical experiments demonstrate that our algorithmic framework has outperformed the state-of-the-art methods by up to 10 times on various tasks, such as image classification and object detection.
ActFormer: A GAN Transformer Framework towards General Action-Conditioned 3D Human Motion Generation
Mar 15, 2022



We present a GAN Transformer framework for general action-conditioned 3D human motion generation, including not only single-person actions but also multi-person interactive actions. Our approach consists of a powerful Action-conditioned motion transFormer (ActFormer) under a GAN training scheme, equipped with a Gaussian Process latent prior. Such a design combines the strong spatio-temporal representation capacity of Transformer, superiority in generative modeling of GAN, and inherent temporal correlations from latent prior. Furthermore, ActFormer can be naturally extended to multi-person motions by alternately modeling temporal correlations and human interactions with Transformer encoders. We validate our approach by comparison with other methods on larger-scale benchmarks, including NTU RGB+D 120 and BABEL. We also introduce a new synthetic dataset of complex multi-person combat behaviors to facilitate research on multi-person motion generation. Our method demonstrates adaptability to various human motion representations and achieves leading performance over SOTA methods on both single-person and multi-person motion generation tasks, indicating a hopeful step towards a universal human motion generator.