 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransNet: Transparent Object Manipulation Through Category-Level Pose Estimation
Jul 23, 2023



Transparent objects present multiple distinct challenges to visual perception systems. First, their lack of distinguishing visual features makes transparent objects harder to detect and localize than opaque objects. Even humans find certain transparent surfaces with little specular reflection or refraction, like glass doors, difficult to perceive. A second challenge is that depth sensors typically used for opaque object perception cannot obtain accurate depth measurements on transparent surfaces due to their unique reflective properties. Stemming from these challenges, we observe that transparent object instances within the same category, such as cups, look more similar to each other than to ordinary opaque objects of that same category. Given this observation, the present paper explores the possibility of category-level transparent object pose estimation rather than instance-level pose estimation. We propose \textit{\textbf{TransNet}}, a two-stage pipeline that estimates category-level transparent object pose using localized depth completion and surface normal estimation. TransNet is evaluated in terms of pose estimation accuracy on a large-scale transparent object dataset and compared to a state-of-the-art category-level pose estimation approach. Results from this comparison demonstrate that TransNet achieves improved pose estimation accuracy on transparent objects. Moreover, we use TransNet to build an autonomous transparent object manipulation system for robotic pick-and-place and pouring tasks.
TransNet: Category-Level Transparent Object Pose Estimation
Aug 22, 2022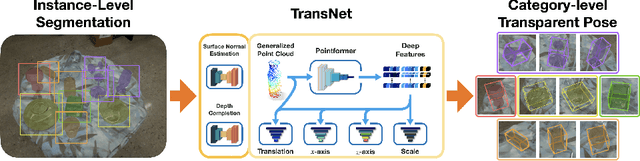


Transparent objects present multiple distinct challenges to visual perception systems. First, their lack of distinguishing visual features makes transparent objects harder to detect and localize than opaque objects. Even humans find certain transparent surfaces with little specular reflection or refraction, e.g. glass doors, difficult to perceive. A second challenge is that common depth sensors typically used for opaque object perception cannot obtain accurate depth measurements on transparent objects due to their unique reflective properties. Stemming from these challenges, we observe that transparent object instances within the same category (e.g. cups) look more similar to each other than to ordinary opaque objects of that same category. Given this observation, the present paper sets out to explore the possibility of category-level transparent object pose estimation rather than instance-level pose estimation. We propose TransNet, a two-stage pipeline that learns to estimate category-level transparent object pose using localized depth completion and surface normal estimation. TransNet is evaluated in terms of pose estimation accuracy on a recent, large-scale transparent object dataset and compared to a state-of-the-art category-level pose estimation approach. Results from this comparison demonstrate that TransNet achieves improved pose estimation accuracy on transparent objects and key findings from the included ablation studies suggest future directions for performance improvements.
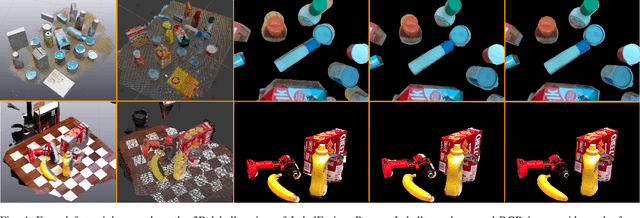
ClearPose: Large-scale Transparent Object Dataset and Benchmark
Mar 08, 2022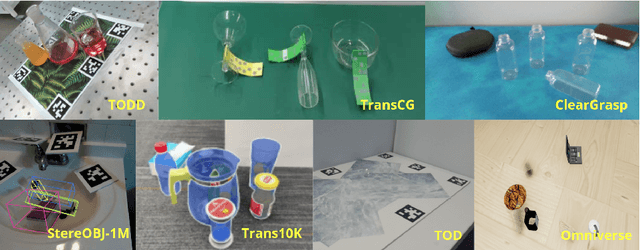
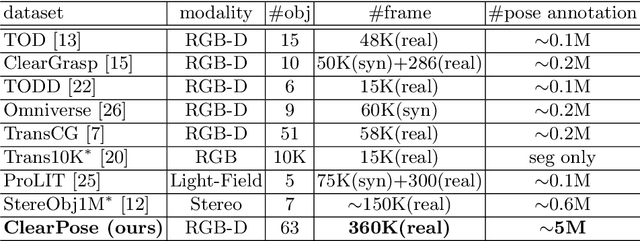

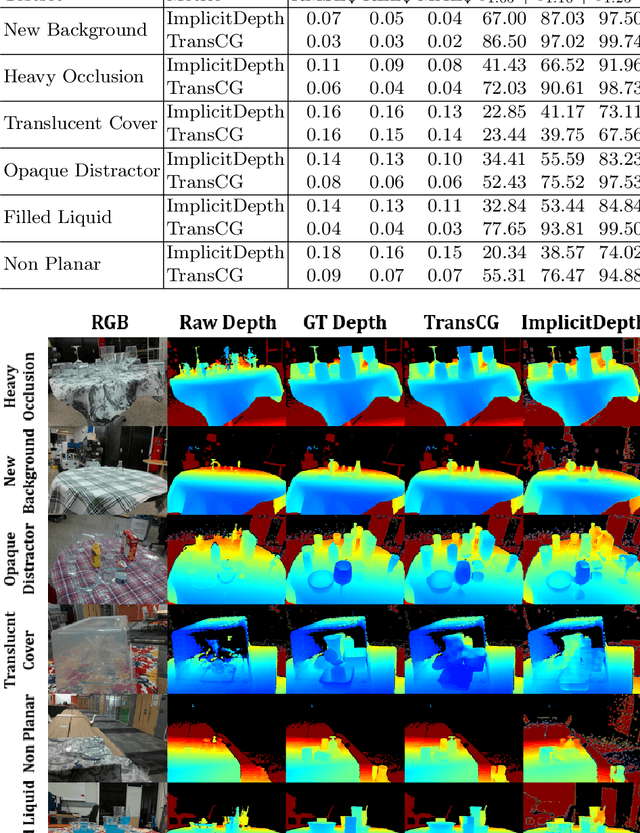
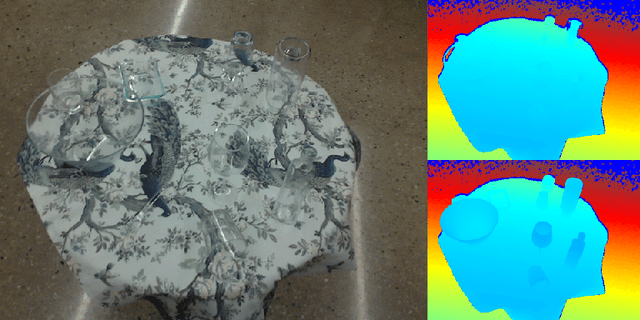
Transparent objects are ubiquitous in household settings and pose distinct challenges for visual sensing and perception systems. The optical properties of transparent objects leave conventional 3D sensors alone unreliable for object depth and pose estimation. These challenges are highlighted by the shortage of large-scale RGB-Depth datasets focusing on transparent objects in real-world settings. In this work, we contribute a large-scale real-world RGB-Depth transparent object dataset named ClearPose to serve as a benchmark dataset for segmentation, scene-level depth completion and object-centric pose estimation tasks. The ClearPose dataset contains over 350K labeled real-world RGB-Depth frames and 4M instance annotations covering 63 household objects. The dataset includes object categories commonly used in daily life under various lighting and occluding conditions as well as challenging test scenarios such as cases of occlusion by opaque or translucent objects, non-planar orientations, presence of liquids, etc. We benchmark several state-of-the-art depth completion and object pose estimation deep neural networks on ClearPose.
ProgressLabeller: Visual Data Stream Annotation for Training Object-Centric 3D Perception
Mar 01, 2022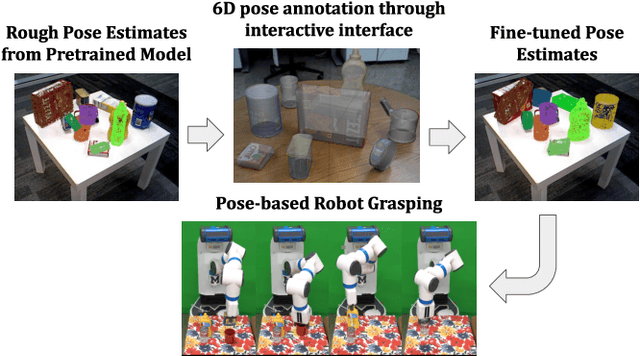
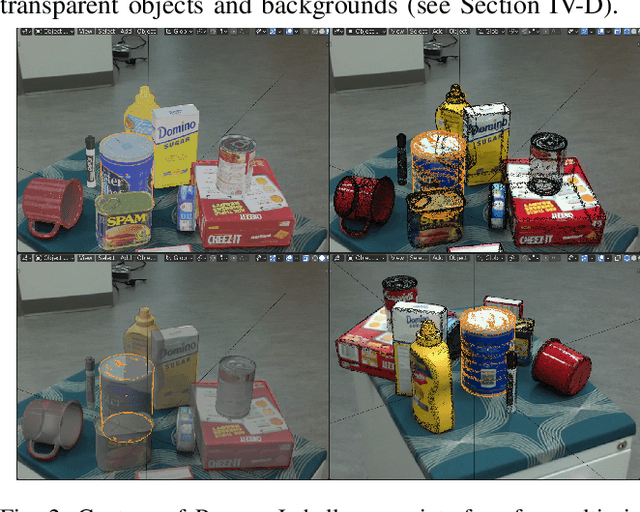
Visual perception tasks often require vast amounts of labelled data, including 3D poses and image space segmentation masks. The process of creating such training data sets can prove difficult or time-intensive to scale up to efficacy for general use. Consider the task of pose estimation for rigid objects. Deep neural network based approaches have shown good performance when trained on large, public datasets. However, adapting these networks for other novel objects, or fine-tuning existing models for different environments, requires significant time investment to generate newly labelled instances. Towards this end, we propose ProgressLabeller as a method for more efficiently generating large amounts of 6D pose training data from color images sequences for custom scenes in a scalable manner. ProgressLabeller is intended to also support transparent or translucent objects, for which the previous methods based on depth dense reconstruction will fail. We demonstrate the effectiveness of ProgressLabeller by rapidly create a dataset of over 1M samples with which we fine-tune a state-of-the-art pose estimation network in order to markedly improve the downstream robotic grasp success rates. ProgressLabeller will be made publicly available soon.