 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Multi-Modal Intelligent U2V Channel Model for 6G Sensing-Communication Integration
May 13, 2026This paper proposes a novel UAV-to-Vehicle (U2V) channel model for sixth-generation (6G) intelligent sensing-communication integration, based on three-dimensional (3D) scatterer prediction. To explore the mapping relationship between physical environment and electromagnetic space, a new high-fidelity mixed sensing-communication integration U2V simulation dataset under wide-lane scenarios with different vehicular traffic densities (VTDs) and UAV heights is constructed. Based on the constructed dataset, a novel 3D Scatterer Prediction and Distribution Estimation (3D-SPADE) algorithm is proposed, which leverages LiDAR point clouds to accurately predict the spatial distribution of scatterers. Furthermore, the clustering of scatterers and the subsequent classification into dynamic and static types are meticulously designed for highly dynamic U2V scenarios, while reducing computational complexity and improving modeling accuracy. As LiDAR point clouds vary over time, dynamic and static clusters evolve via 3D-SPADE, enabling precise modeling of channel non-stationarity and consistency. Simulation results demonstrate that, in the wide-lane scenario with varying VTDs and UAV heights, the proposed 3D-SPADE consistently achieves high scatterer occupancy detection performance within the voxel grid. In particular, under favorable configurations, recall reaches 93.26%, and precision reaches 95.74%, highlighting the reliability of 3D-SPADE. Key channel statistical characteristics are simulated and analyzed. These characteristics from the simulation experiments are highly consistent with ray-tracing results and exhibit better agreement than with the standardized model and inconsistent model, validating the necessity of exploring the mapping relationship and the effectiveness of the proposed model.
Multi-Modal Intelligent Channel Modeling: From Fine-tuned LLMs to Pre-trained Foundation Models
Mar 11, 2026To meet the evolving demands of sixth-generation (6G) wireless channel modeling, such as precise prediction capability, extension capabilities, and system participation capability, multi-modal intelligent channel modeling (MMICM) has been proposed based on Synesthesia of Machines (SoM) which explores the mapping relationship between multi-modal sensing in physical environment and channel characteristics in electromagnetic space. Furthermore, for integrating heterogeneous sensing, reasoning across scales, and generalizing to complex air-space-ground-sea communication environments, two new paradigms of MMICM are explored, including fine-tuned large language models (LLMs) for Channel Modeling (LLM4CM) and Wireless Channel Foundation Model (WiCo). LLM4CM leverages pre-trained LLMs on channel representations for cross-modal alignment and lightweight adaptation, enabling flexible channel modeling for 6G multi-band and multi-scenario communication systems. WiCo, which pre-trained on physically valid channel realizations and their associated environmental and modal observations, embeds electromagnetic equations for physical interpretability and uses parameterized adapters for scalability. This article details the architectures and features of LLM4CM and WiCo, laying a foundation for artificial intelligence (AI)-native 6G wireless communication systems. Then, we conducts a comparative analysis of the two emerging paradigms, focusing on their distinct characteristics, relative advantages, inherent limitations, and performance attributes. Finally, we discuss the future research directions.
WiCo-MG: Wireless Channel Foundation Model for Multipath Generation via Synesthesia of Machines
Nov 19, 2025Precise modeling of channel multipath is essential for understanding wireless propagation environments and optimizing communication systems. In particular, sixth-generation (6G) artificial intelligence (AI)-native communication systems demand massive and high-quality multipath channel data to enable intelligent model training and performance optimization. In this paper, we propose a wireless channel foundation model (WiCo) for multipath generation (WiCo-MG) via Synesthesia of Machines (SoM). To provide a solid training foundation for WiCo-MG, a new synthetic intelligent sensing-communication dataset for uncrewed aerial vehicle (UAV)-to-ground (U2G) communications is constructed. To overcome the challenges of cross-modal alignment and mapping, a two-stage training framework is proposed. In the first stage, sensing images are embedded into discrete-continuous SoM feature spaces, and multipath maps are embedded into a sensing-initialized discrete SoM space to align the representations. In the second stage, a mixture of shared and routed experts (S-R MoE) Transformer with frequency-aware expert routing learns the mapping from sensing to channel SoM feature spaces, enabling decoupled and adaptive multipath generation. Experimental results demonstrate that WiCo-MG achieves state-of-the-art in-distribution generation performance and superior out-of-distribution generalization, reducing NMSE by more than 2.59 dB over baselines, while exhibiting strong scalability in model and dataset growth and extensibility to new multipath parameters and tasks. Owing to higher accuracy, stronger generalization, and better scalability, WiCo-MG is expected to enable massive and high-fidelity channel data generation for the development of 6G AI-native communication systems.
Multi-Modal Intelligent Channel Modeling Framework for 6G-Enabled Networked Intelligent Systems
Sep 09, 2025The design and technology development of 6G-enabled networked intelligent systems needs an accurate real-time channel model as the cornerstone. However, with the new requirements of 6G-enabled networked intelligent systems, the conventional channel modeling methods face many limitations. Fortunately, the multi-modal sensors equipped on the intelligent agents bring timely opportunities, i.e., the intelligent integration and mutually beneficial mechanism between communications and multi-modal sensing could be investigated based on the artificial intelligence (AI) technologies. In this case, the mapping relationship between physical environment and electromagnetic channel could be explored via Synesthesia of Machines (SoM). This article presents a novel multi-modal intelligent channel modeling (MMICM) framework for 6G-enabled networked intelligent systems, which establishes a nonlinear model between multi-modal sensing and channel characteristics, including large-scale and small-scale channel characteristics. The architecture and features of proposed intelligent modeling framework are expounded and the key technologies involved are also analyzed. Finally, the system-engaged applications and potential research directions of MMICM framework are outlined.
LLM4SP: Large Language Models for Scatterer Prediction via Synesthesia of Machines
May 23, 2025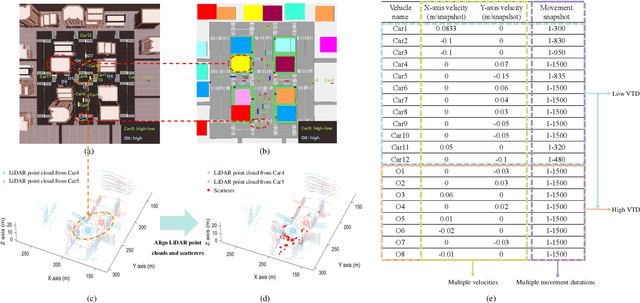
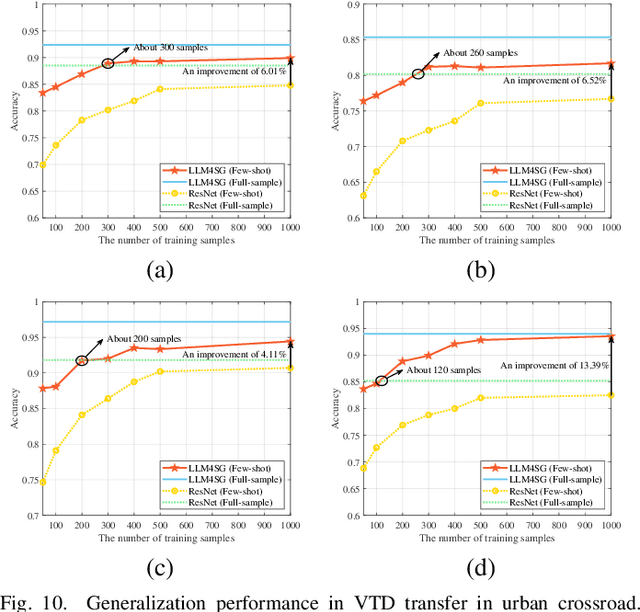
Guided by Synesthesia of Machines (SoM), the nonlinear mapping relationship between sensory and communication information serves as a powerful tool to enhance both the accuracy and generalization of vehicle-to-vehicle (V2V) multi-modal intelligent channel modeling (MMICM) in intelligent transportation systems (ITSs). To explore the general mapping relationship between physical environment and electromagnetic space, a new intelligent sensing-communication integration dataset, named V2V-M3, is constructed for multiple scenarios in V2V communications with multiple frequency bands and multiple vehicular traffic densities (VTDs). Leveraging the strong representation and cross-modal inference capabilities of large language models (LLMs), a novel LLM-based method for Scatterer Prediction (LLM4SP) from light detection and ranging (LiDAR) point clouds is developed. To address the inherent and significant differences across multi-modal data, synergistically optimized four-module architecture, i.e., preprocessor, embedding, backbone, and output modules, are designed by considering the sensing/channel characteristics and electromagnetic propagation mechanism. On the basis of cross-modal representation alignment and positional encoding, the network of LLM4SP is fine-tuned to capture the general mapping relationship between LiDAR point clouds and scatterers. Simulation results demonstrate that the proposed LLM4SP achieves superior performance in full-sample and generalization testing, significantly outperforming small models across different frequency bands, scenarios, and VTDs.
SynthSoM: A synthetic intelligent multi-modal sensing-communication dataset for Synesthesia of Machines (SoM)
Jan 13, 2025



Given the importance of datasets for sensing-communication integration research, a novel simulation platform for constructing communication and multi-modal sensory dataset is developed. The developed platform integrates three high-precision software, i.e., AirSim, WaveFarer, and Wireless InSite, and further achieves in-depth integration and precise alignment of them. Based on the developed platform, a new synthetic intelligent multi-modal sensing-communication dataset for Synesthesia of Machines (SoM), named SynthSoM, is proposed. The SynthSoM dataset contains various air-ground multi-link cooperative scenarios with comprehensive conditions, including multiple weather conditions, times of the day, intelligent agent densities, frequency bands, and antenna types. The SynthSoM dataset encompasses multiple data modalities, including radio-frequency (RF) channel large-scale and small-scale fading data, RF millimeter wave (mmWave) radar sensory data, and non-RF sensory data, e.g., RGB images, depth maps, and light detection and ranging (LiDAR) point clouds. The quality of SynthSoM dataset is validated via statistics-based qualitative inspection and evaluation metrics through machine learning (ML) via real-world measurements. The SynthSoM dataset is open-sourced and provides consistent data for cross-comparing SoM-related algorithms.
Synesthesia of Machines Based Multi-Modal Intelligent V2V Channel Model
Jan 13, 2025


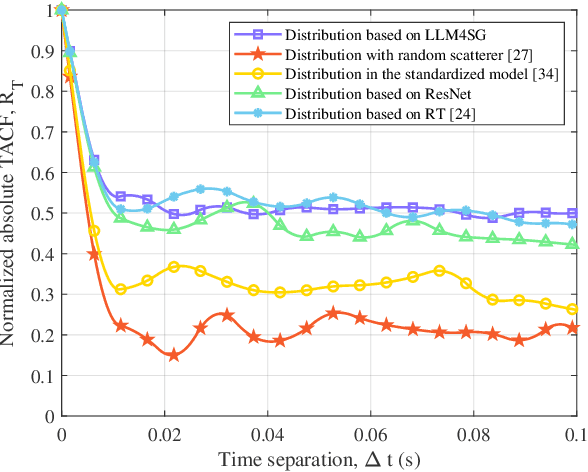
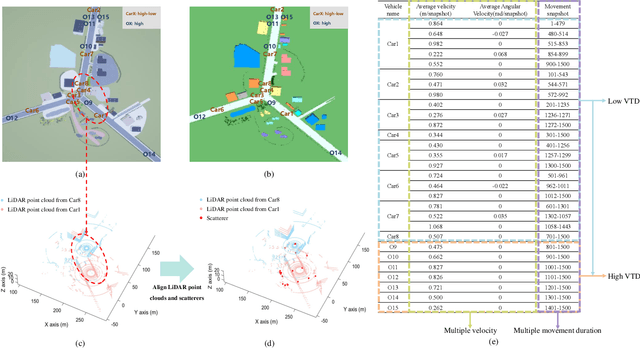
This paper proposes a novel sixth-generation (6G) multi-modal intelligent vehicle-to-vehicle (V2V) channel model from light detection and ranging (LiDAR) point clouds based on Synesthesia of Machines (SoM). To explore the mapping relationship between physical environment and electromagnetic space, a new V2V high-fidelity mixed sensing-communication integration simulation dataset with different vehicular traffic densities (VTDs) is constructed. Based on the constructed dataset, a novel scatterer recognition (ScaR) algorithm utilizing neural network SegNet is developed to recognize scatterer spatial attributes from LiDAR point clouds via SoM. In the developed ScaR algorithm, the mapping relationship between LiDAR point clouds and scatterers is explored, where the distribution of scatterers is obtained in the form of grid maps. Furthermore, scatterers are distinguished into dynamic and static scatterers based on LiDAR point cloud features, where parameters, e.g., distance, angle, and number, related to scatterers are determined. Through ScaR, dynamic and static scatterers change with the variation of LiDAR point clouds over time, which precisely models channel non-stationarity and consistency under different VTDs. Some important channel statistical properties, such as time-frequency correlation function (TF-CF) and Doppler power spectral density (DPSD), are obtained. Simulation results match well with ray-tracing (RT)-based results, thus demonstrating the necessity of exploring the mapping relationship and the utility of the proposed model.
Scatterer Recognition from LiDAR Point Clouds for Environment-Embedded Vehicular Channel Modeling via Synesthesia of Machines
Jun 27, 2024



In this paper, a novel environment-embedded vehicular channel model is proposed by scatterer recognition from light detection and ranging (LiDAR) point clouds via Synesthesia of Machines (SoM). To provide a robust data foundation, a new intelligent sensing-communication integration dataset in vehicular urban scenarios is constructed. Based on the constructed dataset, the complex SoM mechanism, i.e., mapping relationship between scatterers in electromagnetic space and LiDAR point clouds in physical environment, is explored via multilayer perceptron (MLP) with electromagnetic propagation mechanism. By using LiDAR point clouds to implement scatterer recognition, channel non-stationarity and consistency are modeled in an environment-embedded manner. Using ray-tracing (RT)-based results as the ground truth, the scatterer recognition accuracy exceeds 90%. The accuracy of the proposed model is further verified by the close fit between simulation results and RT results.