 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic spatial clustering based on the Self Discipline Learning (SDL) model of autonomous learning
Jan 14, 2022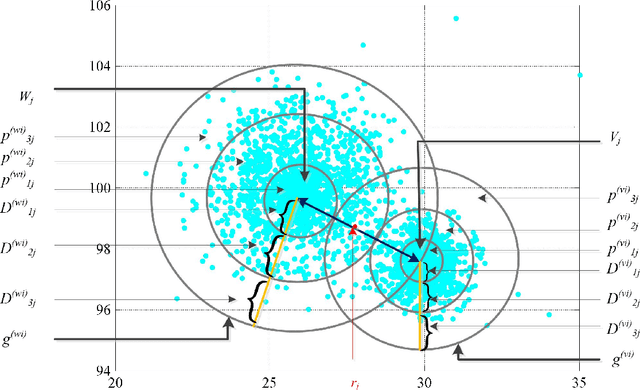
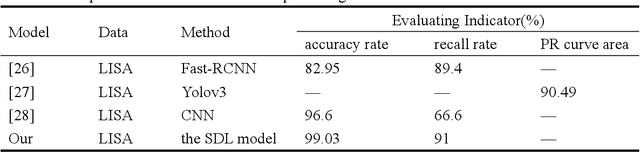
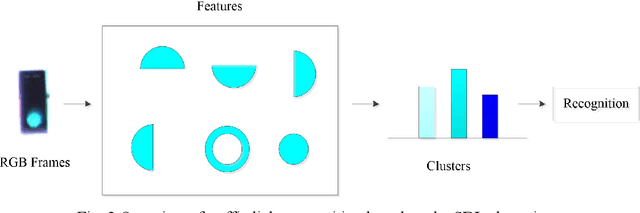
Unsupervised clustering algorithm can effectively reduce the dimension of high-dimensional unlabeled data, thus reducing the time and space complexity of data processing. However, the traditional clustering algorithm needs to set the upper bound of the number of categories in advance, and the deep learning clustering algorithm will fall into the problem of local optimum. In order to solve these problems, a probabilistic spatial clustering algorithm based on the Self Discipline Learning(SDL) model is proposed. The algorithm is based on the Gaussian probability distribution of the probability space distance between vectors, and uses the probability scale and maximum probability value of the probability space distance as the distance measurement judgment, and then determines the category of each sample according to the distribution characteristics of the data set itself. The algorithm is tested in Laboratory for Intelligent and Safe Automobiles(LISA) traffic light data set, the accuracy rate is 99.03%, the recall rate is 91%, and the effect is achieved.
The Modeling of SDL Aiming at Knowledge Acquisition in Automatic Driving
Dec 07, 2018


In this paper we proposed an ultimate theory to solve the multi-target control problem through its introduction to the machine learning framework in automatic driving, which explored the implementation of excellent drivers' knowledge acquisition. Nowadays there exist some core problems that have not been fully realized by the researchers in automatic driving, such as the optimal way to control the multi-target objective functions of energy saving, safe driving, headway distance control and comfort driving, as well as the resolvability of the networks that automatic driving relied on and the high-performance chips like GPU on the complex driving environments. According to these problems, we developed a new theory to map multitarget objective functions in different spaces into the same one and thus introduced a machine learning framework of SDL(Super Deep Learning) for optimal multi-targetcontrol based on knowledge acquisition. We will present in this paper the optimal multi-target control by combining the fuzzy relationship of each multi-target objective function and the implementation of excellent drivers' knowledge acquired by machine learning. Theoretically, the impact of this method will exceed that of the fuzzy control method used in automatic train.
Distance formulas capable of unifying Euclidian space and probability space
Jan 06, 2018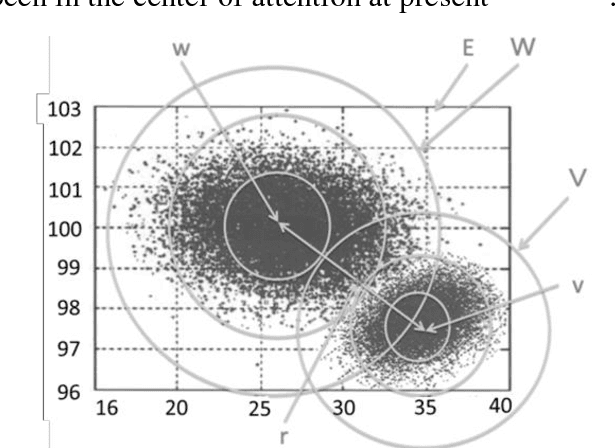
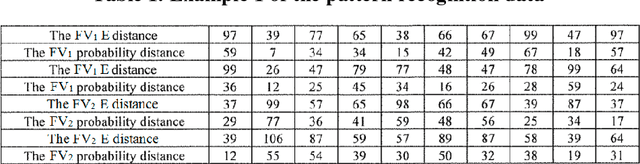
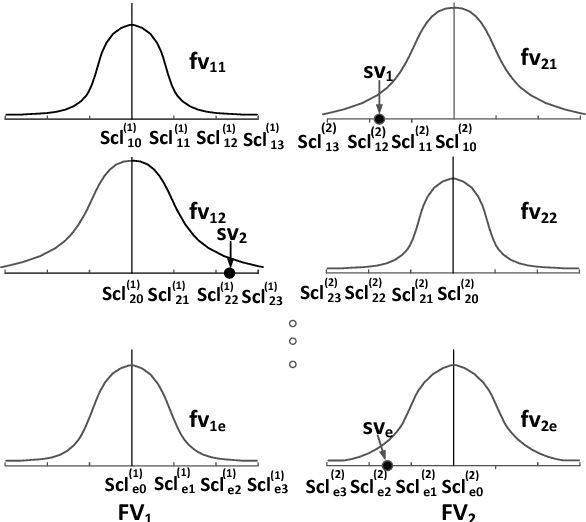
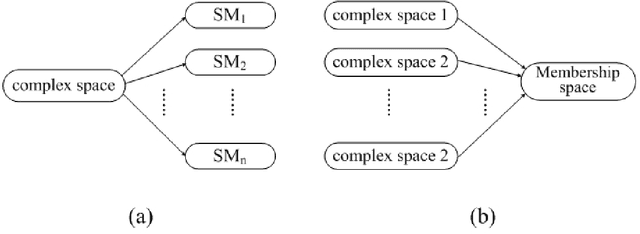
For pattern recognition like image recognition, it has become clear that each machine-learning dictionary data actually became data in probability space belonging to Euclidean space. However, the distances in the Euclidean space and the distances in the probability space are separated and ununified when machine learning is introduced in the pattern recognition. There is still a problem that it is impossible to directly calculate an accurate matching relation between the sampling data of the read image and the learned dictionary data. In this research, we focused on the reason why the distance is changed and the extent of change when passing through the probability space from the original Euclidean distance among data belonging to multiple probability spaces containing Euclidean space. By finding the reason of the cause of the distance error and finding the formula expressing the error quantitatively, a possible distance formula to unify Euclidean space and probability space is found. Based on the results of this research, the relationship between machine-learning dictionary data and sampling data was clearly understood for pattern recognition. As a result, the calculation of collation among data and machine-learning to compete mutually between data are cleared, and complicated calculations became unnecessary. Finally, using actual pattern recognition data, experimental demonstration of a possible distance formula to unify Euclidean space and probability space discovered by this research was carried out, and the effectiveness of the result was confirmed.