 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCo-Movement and Trust Development in Human-Robot Teams
Sep 30, 2024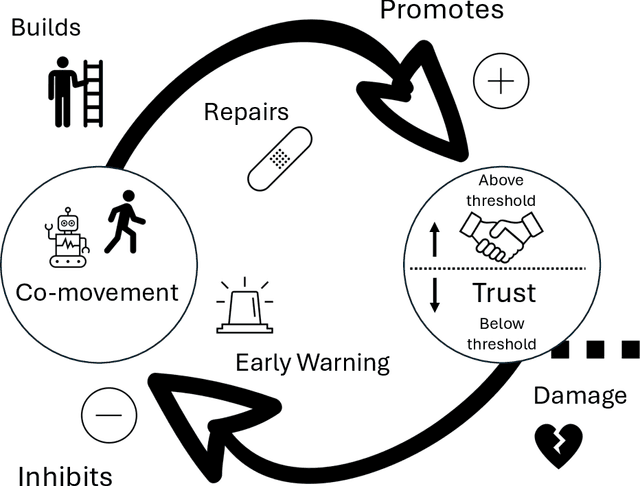
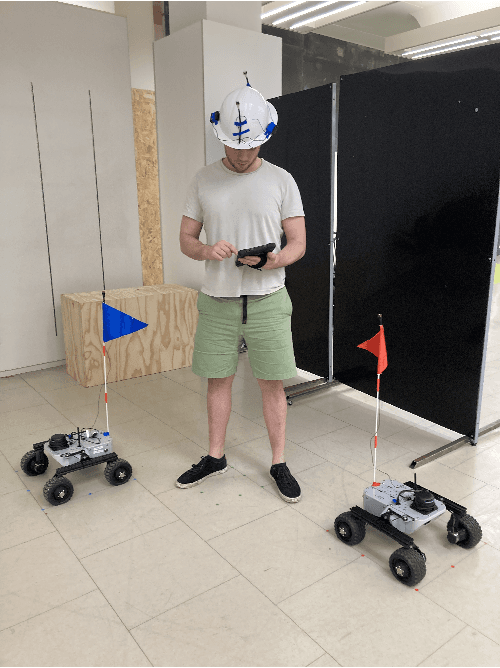
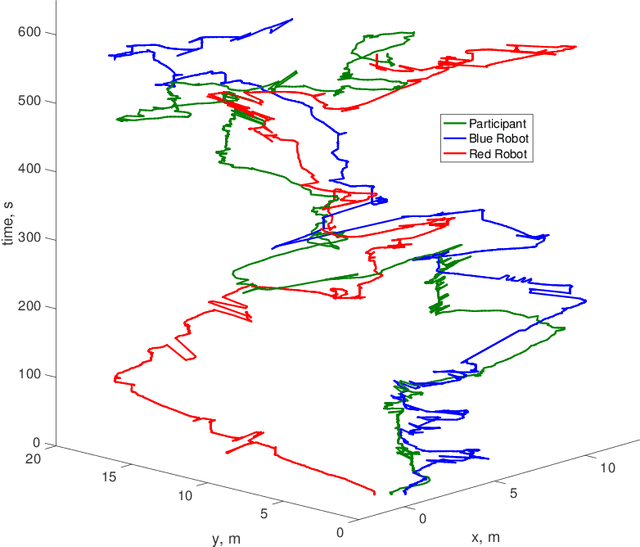
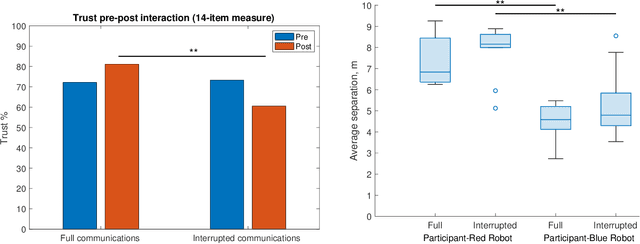
For humans and robots to form an effective human-robot team (HRT) there must be sufficient trust between team members throughout a mission. We analyze data from an HRT experiment focused on trust dynamics in teams of one human and two robots, where trust was manipulated by robots becoming temporarily unresponsive. Whole-body movement tracking was achieved using ultrasound beacons, alongside communications and performance logs from a human-robot interface. We find evidence that synchronization between time series of human-robot movement, within a certain spatial proximity, is correlated with changes in self-reported trust. This suggests that the interplay of proxemics and kinesics, i.e. moving together through space, where implicit communication via coordination can occur, could play a role in building and maintaining trust in human-robot teams. Thus, quantitative indicators of coordination dynamics between team members could be used to predict trust over time and also provide early warning signals of the need for timely trust repair if trust is damaged. Hence, we aim to develop the metrology of trust in mobile human-robot teams.
Collective Anomaly Perception During Multi-Robot Patrol: Constrained Interactions Can Promote Accurate Consensus
Dec 19, 2023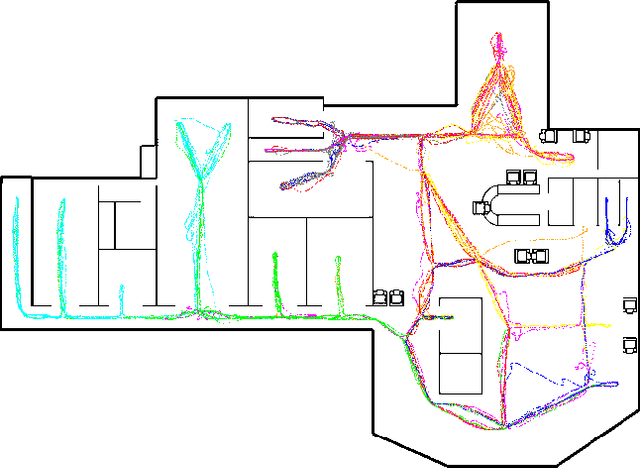
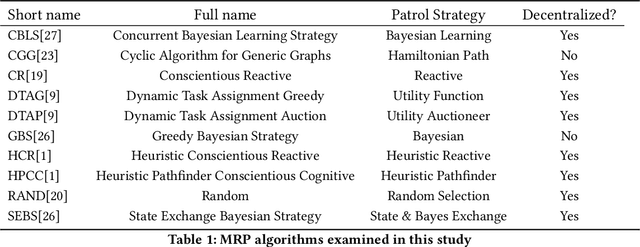
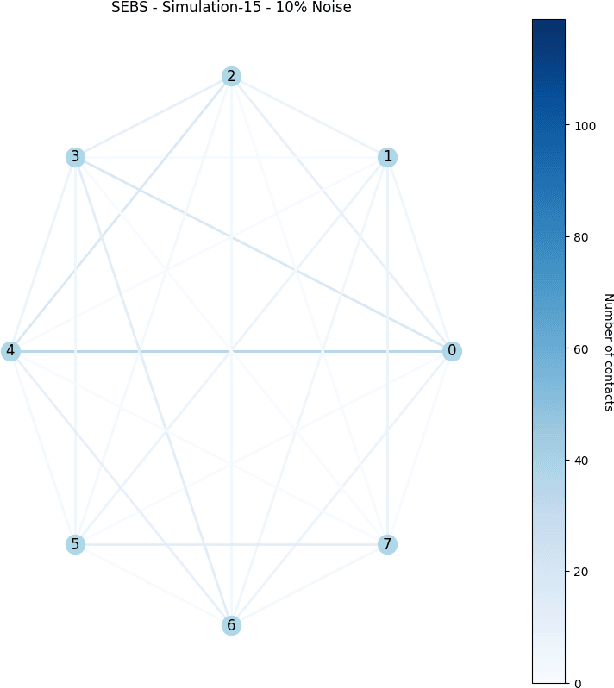
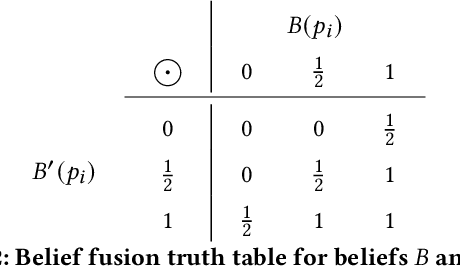
An important real-world application of multi-robot systems is multi-robot patrolling (MRP), where robots must carry out the activity of going through an area at regular intervals. Motivations for MRP include the detection of anomalies that may represent security threats. While MRP algorithms show some maturity in development, a key potential advantage has been unexamined: the ability to exploit collective perception of detected anomalies to prioritize the location ordering of security checks. This is because noisy individual-level detection of an anomaly may be compensated for by group-level consensus formation regarding whether an anomaly is likely to be truly present. Here, we examine the performance of unmodified idleness-based patrolling algorithms when given the additional objective of reaching an environmental perception consensus via local pairwise communication and a quorum threshold. We find that generally, MRP algorithms that promote physical mixing of robots, as measured by a higher connectivity of their emergent communication network, reach consensus more quickly. However, when there is noise present in anomaly detection, a more moderate (constrained) level of connectivity is preferable because it reduces the spread of false positive detections, as measured by a group-level F-score. These findings can inform user choice of MRP algorithm and future algorithm development.