 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePractical Handling of Dynamic Environments in Decentralised Multi-Robot Patrol
Sep 16, 2025Persistent monitoring using robot teams is of interest in fields such as security, environmental monitoring, and disaster recovery. Performing such monitoring in a fully on-line decentralised fashion has significant potential advantages for robustness, adaptability, and scalability of monitoring solutions, including, in principle, the capacity to effectively adapt in real-time to a changing environment. We examine this through the lens of multi-robot patrol, in which teams of patrol robots must persistently minimise time between visits to points of interest, within environments where traversability of routes is highly dynamic. These dynamics must be observed by patrol agents and accounted for in a fully decentralised on-line manner. In this work, we present a new method of monitoring and adjusting for environment dynamics in a decentralised multi-robot patrol team. We demonstrate that our method significantly outperforms realistic baselines in highly dynamic scenarios, and also investigate dynamic scenarios in which explicitly accounting for environment dynamics may be unnecessary or impractical.
Lightweight Decentralized Neural Network-Based Strategies for Multi-Robot Patrolling
Dec 16, 2024



The problem of decentralized multi-robot patrol has previously been approached primarily with hand-designed strategies for minimization of 'idlenes' over the vertices of a graph-structured environment. Here we present two lightweight neural network-based strategies to tackle this problem, and show that they significantly outperform existing strategies in both idleness minimization and against an intelligent intruder model, as well as presenting an examination of robustness to communication failure. Our results also indicate important considerations for future strategy design.
Co-Movement and Trust Development in Human-Robot Teams
Sep 30, 2024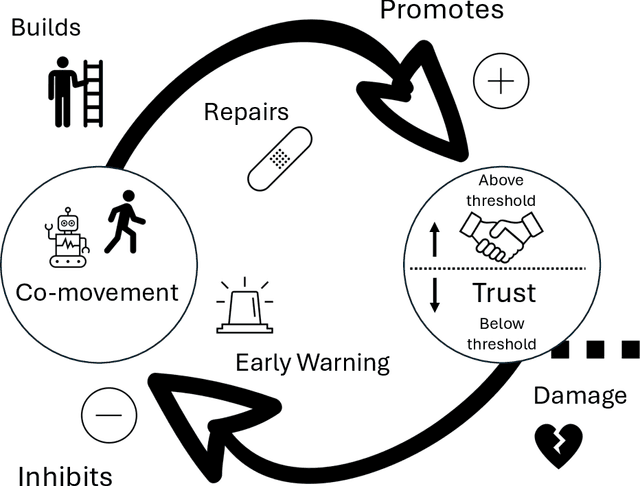
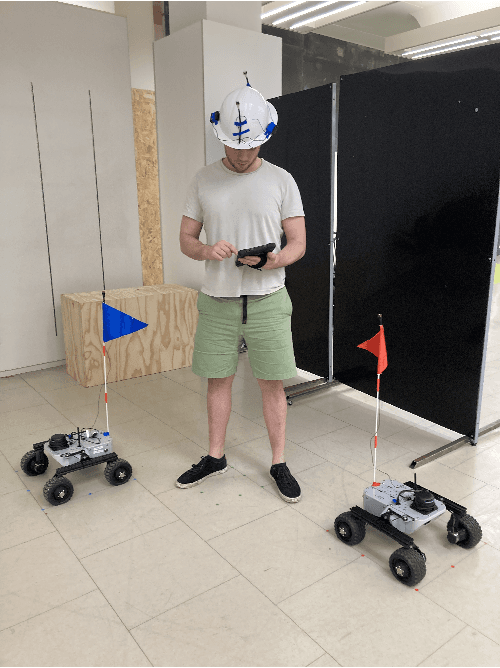
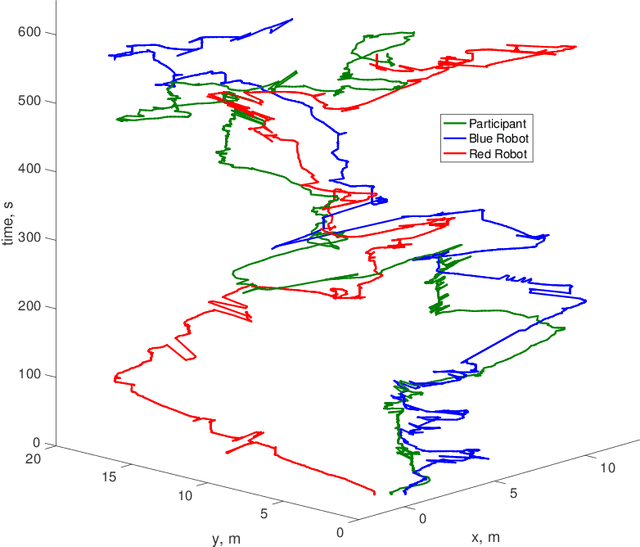
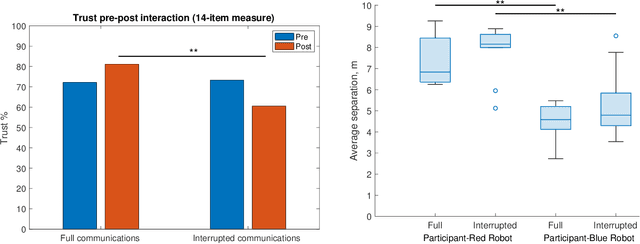
For humans and robots to form an effective human-robot team (HRT) there must be sufficient trust between team members throughout a mission. We analyze data from an HRT experiment focused on trust dynamics in teams of one human and two robots, where trust was manipulated by robots becoming temporarily unresponsive. Whole-body movement tracking was achieved using ultrasound beacons, alongside communications and performance logs from a human-robot interface. We find evidence that synchronization between time series of human-robot movement, within a certain spatial proximity, is correlated with changes in self-reported trust. This suggests that the interplay of proxemics and kinesics, i.e. moving together through space, where implicit communication via coordination can occur, could play a role in building and maintaining trust in human-robot teams. Thus, quantitative indicators of coordination dynamics between team members could be used to predict trust over time and also provide early warning signals of the need for timely trust repair if trust is damaged. Hence, we aim to develop the metrology of trust in mobile human-robot teams.