 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollective Anomaly Perception During Multi-Robot Patrol: Constrained Interactions Can Promote Accurate Consensus
Paper and Code
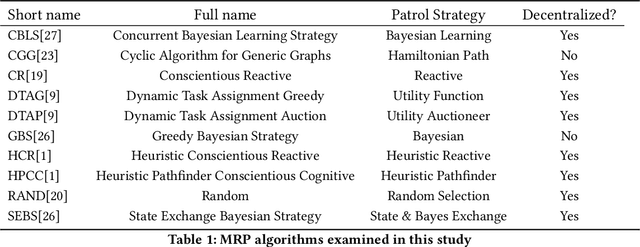
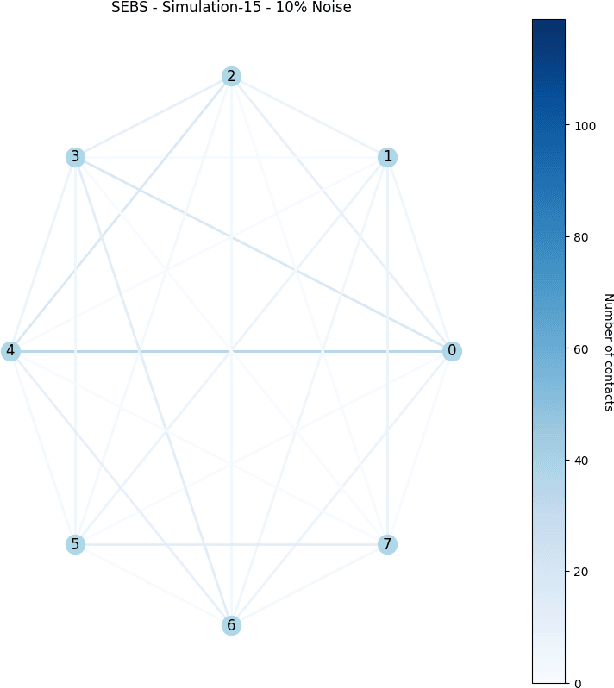
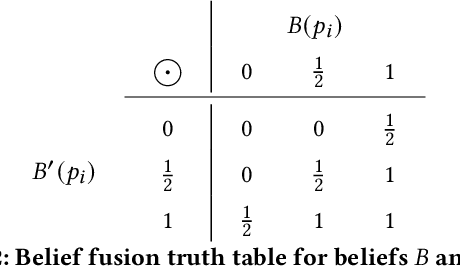
An important real-world application of multi-robot systems is multi-robot patrolling (MRP), where robots must carry out the activity of going through an area at regular intervals. Motivations for MRP include the detection of anomalies that may represent security threats. While MRP algorithms show some maturity in development, a key potential advantage has been unexamined: the ability to exploit collective perception of detected anomalies to prioritize the location ordering of security checks. This is because noisy individual-level detection of an anomaly may be compensated for by group-level consensus formation regarding whether an anomaly is likely to be truly present. Here, we examine the performance of unmodified idleness-based patrolling algorithms when given the additional objective of reaching an environmental perception consensus via local pairwise communication and a quorum threshold. We find that generally, MRP algorithms that promote physical mixing of robots, as measured by a higher connectivity of their emergent communication network, reach consensus more quickly. However, when there is noise present in anomaly detection, a more moderate (constrained) level of connectivity is preferable because it reduces the spread of false positive detections, as measured by a group-level F-score. These findings can inform user choice of MRP algorithm and future algorithm development.