 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMemory-based Controllers for Efficient Data-driven Control of Soft Robots
Sep 19, 2023

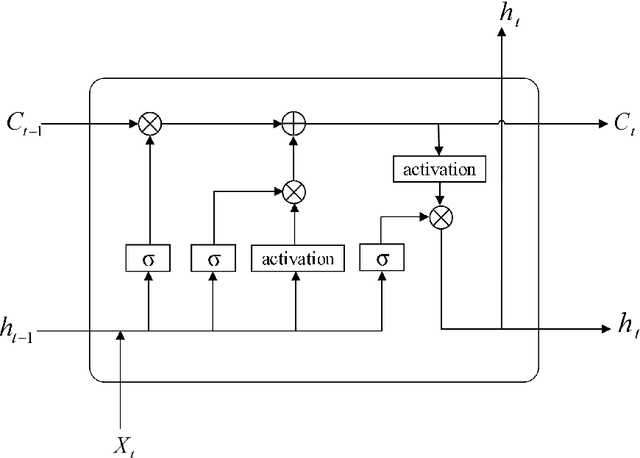
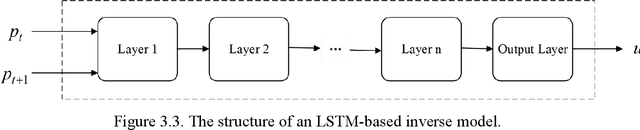
Controller design for soft robots is challenging due to nonlinear deformation and high degrees of freedom of flexible material. The data-driven approach is a promising solution to the controller design problem for soft robots. However, the existing data-driven controller design methods for soft robots suffer from two drawbacks: (i) they require excessively long training time, and (ii) they may result in potentially inefficient controllers. This paper addresses these issues by developing two memory-based controllers for soft robots that can be trained in a data-driven fashion: the finite memory controller (FMC) approach and the long short-term memory (LSTM) based approach. An FMC stores the tracking errors at different time instances and computes the actuation signal according to a weighted sum of the stored tracking errors. We develop three reinforcement learning algorithms for computing the optimal weights of an FMC using the Q-learning, soft actor-critic, and deterministic policy gradient (DDPG) methods. An LSTM-based controller is composed of an LSTM network where the inputs of the network are the robot's desired configuration and current configuration. The LSTM network computes the required actuation signal for the soft robot to follow the desired configuration. We study the performance of the proposed approaches in controlling a soft finger where, as benchmarks, we use the existing reinforcement learning (RL) based controllers and proportional-integral-derivative (PID) controllers. Our numerical results show that the training time of the proposed memory-based controllers is significantly shorter than that of the classical RL-based controllers. Moreover, the proposed controllers achieve a smaller tracking error compared with the classical RL algorithms and the PID controller.
Mining Cross-Person Cues for Body-Part Interactiveness Learning in HOI Detection
Jul 28, 2022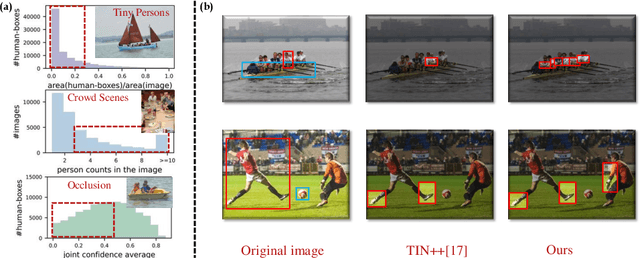
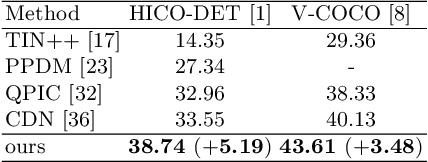

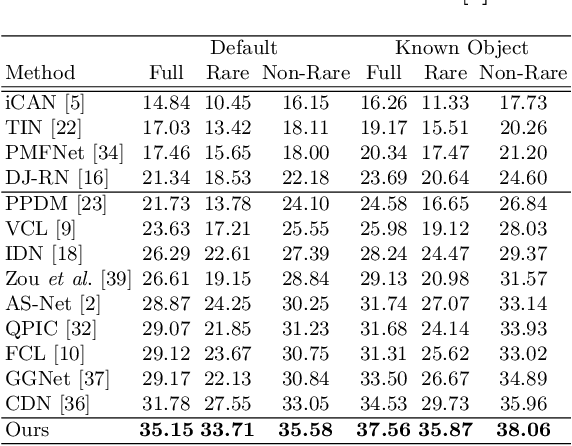
Human-Object Interaction (HOI) detection plays a crucial role in activity understanding. Though significant progress has been made, interactiveness learning remains a challenging problem in HOI detection: existing methods usually generate redundant negative H-O pair proposals and fail to effectively extract interactive pairs. Though interactiveness has been studied in both whole body- and part- level and facilitates the H-O pairing, previous works only focus on the target person once (i.e., in a local perspective) and overlook the information of the other persons. In this paper, we argue that comparing body-parts of multi-person simultaneously can afford us more useful and supplementary interactiveness cues. That said, to learn body-part interactiveness from a global perspective: when classifying a target person's body-part interactiveness, visual cues are explored not only from herself/himself but also from other persons in the image. We construct body-part saliency maps based on self-attention to mine cross-person informative cues and learn the holistic relationships between all the body-parts. We evaluate the proposed method on widely-used benchmarks HICO-DET and V-COCO. With our new perspective, the holistic global-local body-part interactiveness learning achieves significant improvements over state-of-the-art. Our code is available at https://github.com/enlighten0707/Body-Part-Map-for-Interactiveness.