 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePersonalized Emotion Detection from Floor Vibrations Induced by Footsteps
Mar 06, 2025Emotion recognition is critical for various applications such as early detection of mental health disorders and emotion based smart home systems. Previous studies used various sensing methods for emotion recognition, such as wearable sensors, cameras, and microphones. However, these methods have limitations in long term domestic, including intrusiveness and privacy concerns. To overcome these limitations, this paper introduces a nonintrusive and privacy friendly personalized emotion recognition system, EmotionVibe, which leverages footstep induced floor vibrations for emotion recognition. The main idea of EmotionVibe is that individuals' emotional states influence their gait patterns, subsequently affecting the floor vibrations induced by their footsteps. However, there are two main research challenges: 1) the complex and indirect relationship between human emotions and footstep induced floor vibrations and 2) the large between person variations within the relationship between emotions and gait patterns. To address these challenges, we first empirically characterize this complex relationship and develop an emotion sensitive feature set including gait related and vibration related features from footstep induced floor vibrations. Furthermore, we personalize the emotion recognition system for each user by calculating gait similarities between the target person (i.e., the person whose emotions we aim to recognize) and those in the training dataset and assigning greater weights to training people with similar gait patterns in the loss function. We evaluated our system in a real-world walking experiment with 20 participants, summing up to 37,001 footstep samples. EmotionVibe achieved the mean absolute error (MAE) of 1.11 and 1.07 for valence and arousal score estimations, respectively, reflecting 19.0% and 25.7% error reduction compared to the baseline method.
Road Boundary Detection Using 4D mmWave Radar for Autonomous Driving
Mar 03, 2025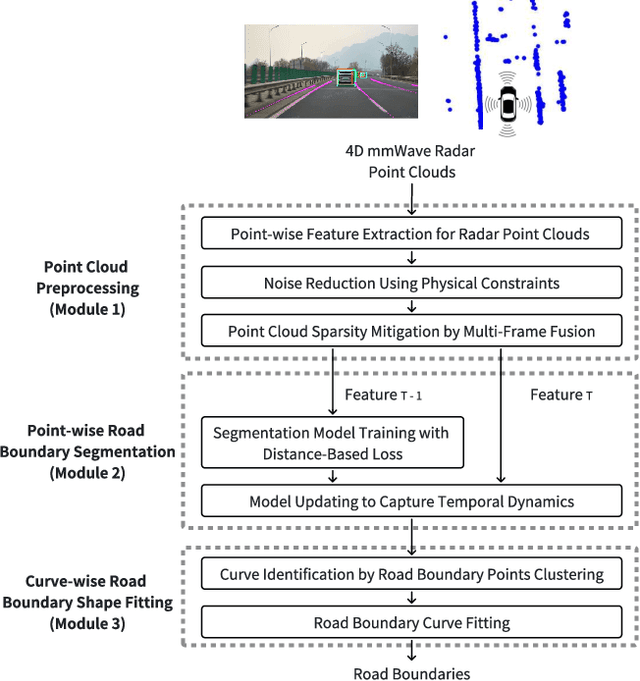
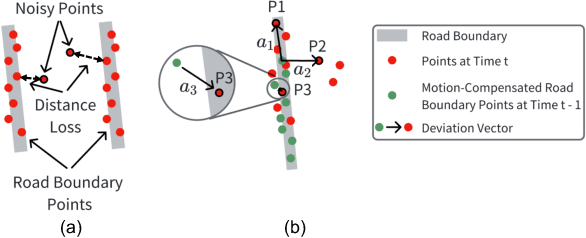
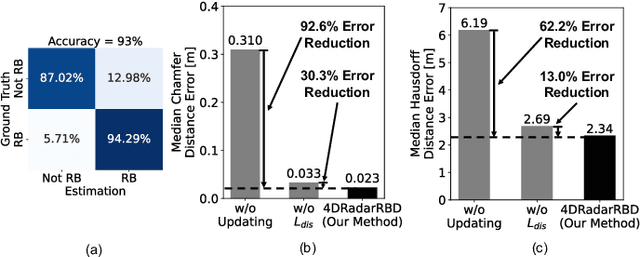
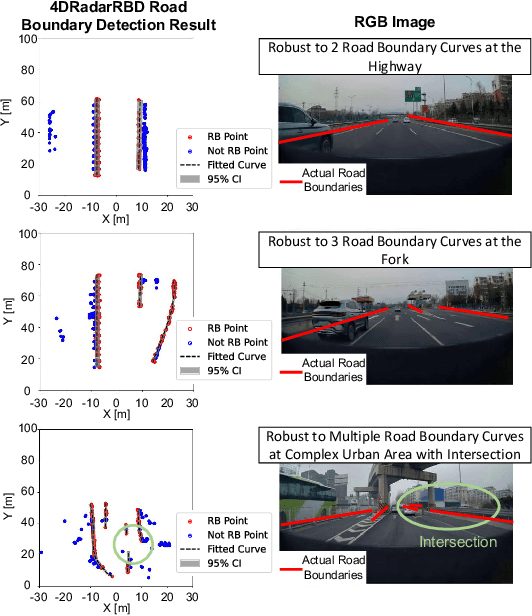
Detecting road boundaries, the static physical edges of the available driving area, is important for safe navigation and effective path planning in autonomous driving and advanced driver-assistance systems (ADAS). Traditionally, road boundary detection in autonomous driving relies on cameras and LiDAR. However, they are vulnerable to poor lighting conditions, such as nighttime and direct sunlight glare, or prohibitively expensive for low-end vehicles. To this end, this paper introduces 4DRadarRBD, the first road boundary detection method based on 4D mmWave radar which is cost-effective and robust in complex driving scenarios. The main idea is that road boundaries (e.g., fences, bushes, roadblocks), reflect millimeter waves, thus generating point cloud data for the radar. To overcome the challenge that the 4D mmWave radar point clouds contain many noisy points, we initially reduce noisy points via physical constraints for road boundaries and then segment the road boundary points from the noisy points by incorporating a distance-based loss which penalizes for falsely detecting the points far away from the actual road boundaries. In addition, we capture the temporal dynamics of point cloud sequences by utilizing each point's deviation from the vehicle motion-compensated road boundary detection result obtained from the previous frame, along with the spatial distribution of the point cloud for point-wise road boundary segmentation. We evaluated 4DRadarRBD through real-world driving tests and achieved a road boundary point segmentation accuracy of 93$\%$, with a median distance error of up to 0.023 m and an error reduction of 92.6$\%$ compared to the baseline model.
WeVibe: Weight Change Estimation Through Audio-Induced Shelf Vibrations In Autonomous Stores
Feb 17, 2025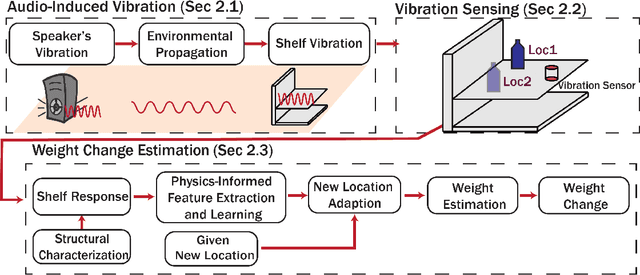
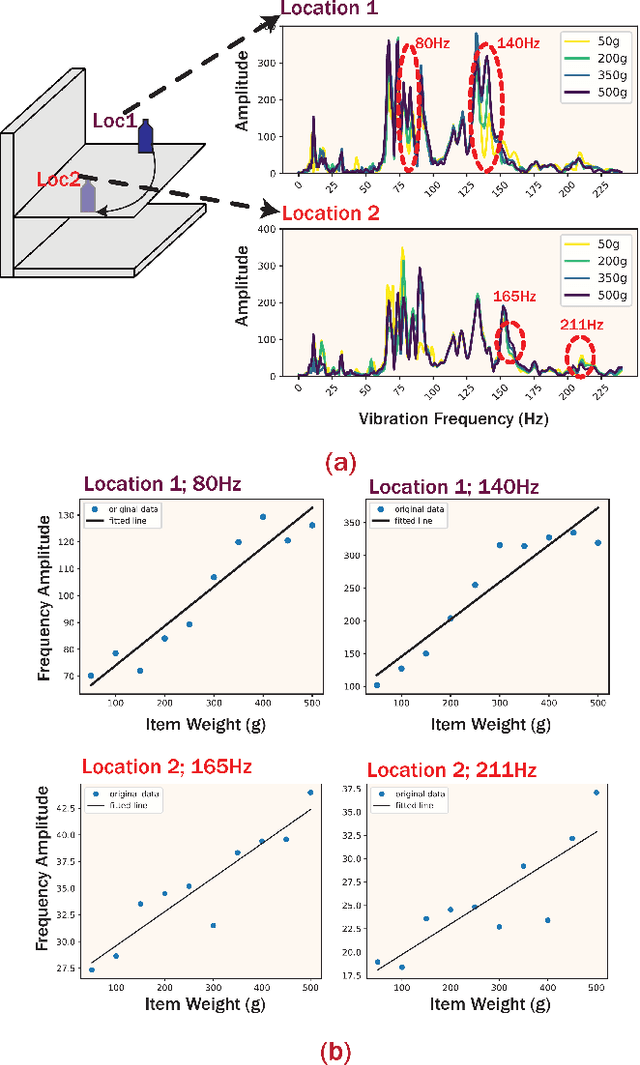
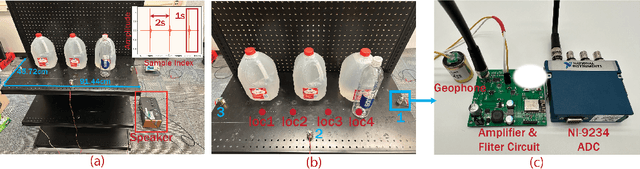
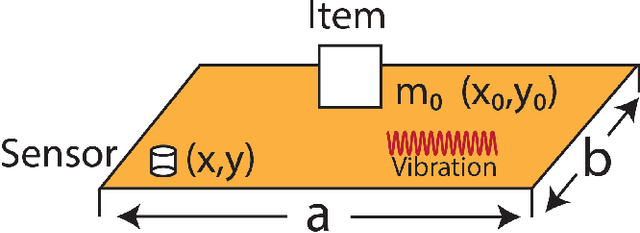
Weight change estimation is crucial in various applications, particularly for detecting pick-up and put-back actions when people interact with the shelf while shopping in autonomous stores. Moreover, accurate weight change estimation allows autonomous stores to automatically identify items being picked up or put back, ensuring precise cost estimation. However, the conventional approach of estimating weight changes requires specialized weight-sensing shelves, which are densely deployed weight scales, incurring intensive sensor consumption and high costs. Prior works explored the vibration-based weight sensing method, but they failed when the location of weight change varies. In response to these limitations, we made the following contributions: (1) We propose WeVibe, a first item weight change estimation system through active shelf vibration sensing. The main intuition of the system is that the weight placed on the shelf influences the dynamic vibration response of the shelf, thus altering the shelf vibration patterns. (2) We model a physics-informed relationship between the shelf vibration response and item weight across multiple locations on the shelf based on structural dynamics theory. This relationship is linear and allows easy training of a weight estimation model at a new location without heavy data collection. (3) We evaluate our system on a gondola shelf organized as the real-store settings. WeVibe achieved a mean absolute error down to 38.07g and a standard deviation of 31.2g with one sensor and 10% samples from three weight classes on estimating weight change from 0g to 450g, which can be leveraged for differentiating items with more than 100g differences.
Detecting Gait Abnormalities in Foot-Floor Contacts During Walking Through FootstepInduced Structural Vibrations
May 22, 2024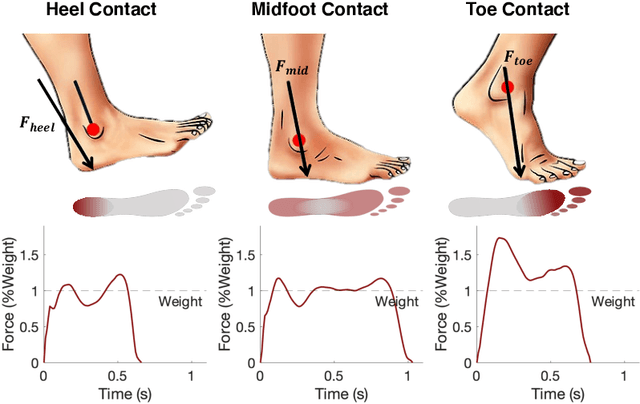
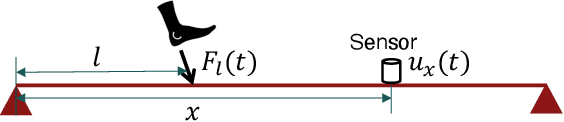
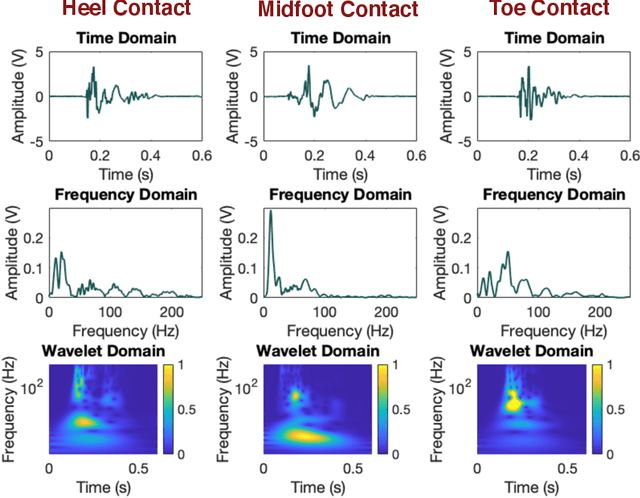
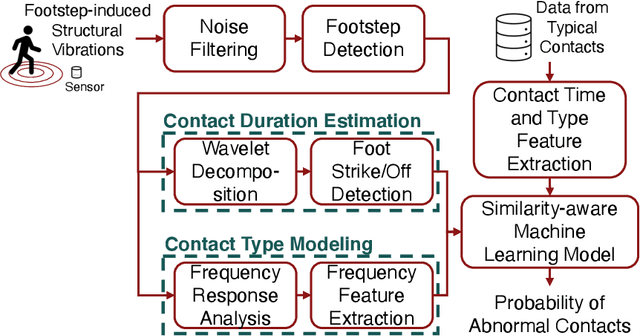
Gait abnormality detection is critical for the early discovery and progressive tracking of musculoskeletal and neurological disorders, such as Parkinson's and Cerebral Palsy. Especially, analyzing the foot-floor contacts during walking provides important insights into gait patterns, such as contact area, contact force, and contact time, enabling gait abnormality detection through these measurements. Existing studies use various sensing devices to capture such information, including cameras, wearables, and force plates. However, the former two lack force-related information, making it difficult to identify the causes of gait health issues, while the latter has limited coverage of the walking path. In this study, we leverage footstep-induced structural vibrations to infer foot-floor contact profiles and detect gait abnormalities. The main challenge lies in modeling the complex force transfer mechanism between the foot and the floor surfaces, leading to difficulty in reconstructing the force and contact profile during foot-floor interaction using structural vibrations. To overcome the challenge, we first characterize the floor vibration for each contact type (e.g., heel, midfoot, and toe contact) to understand how contact forces and areas affect the induced floor vibration. Then, we leverage the time-frequency response spectrum resulting from those contacts to develop features that are representative of each contact type. Finally, gait abnormalities are detected by comparing the predicted foot-floor contact force and motion with the healthy gait. To evaluate our approach, we conducted a real-world walking experiment with 8 subjects. Our approach achieves 91.6% and 96.7% accuracy in predicting contact type and time, respectively, leading to 91.9% accuracy in detecting various types of gait abnormalities, including asymmetry, dragging, and midfoot/toe contacts.
Vibration Signal Denoising Using Deep Learning
Mar 11, 2023Structure vibration signals induced by footsteps are widely used for tasks like occupant identification, localization, human activity inference, structure health monitoring and so on. The vibration signals are collected as time series with amplitude values. However, the collected signals are always noisy in practice due to the influence of environmental noise, electromagnetic interference and other factors. The presence of noise affects the process of signal analysis, thus affecting the accuracy and error of the final tasks. In this paper, we mainly explore the denoising methods for footstep-induced vibration signals. We have considered different kinds of noise including stationary noises such as gaussian noises and non-stationary noises such as item-dropping vibration noise and music noises.
Fuzzy inference system application for oil-water flow patterns identification
May 24, 2021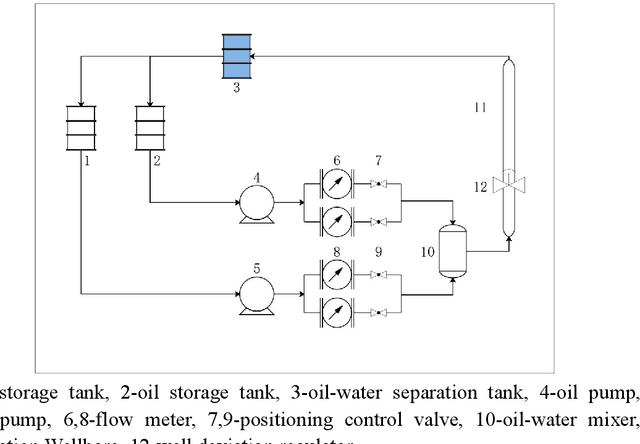
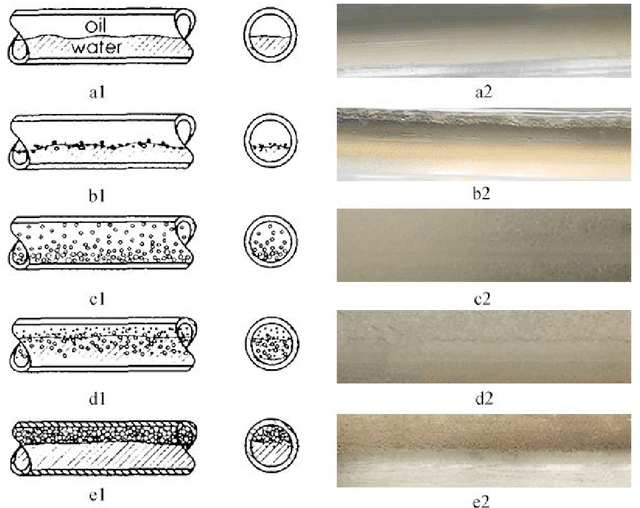
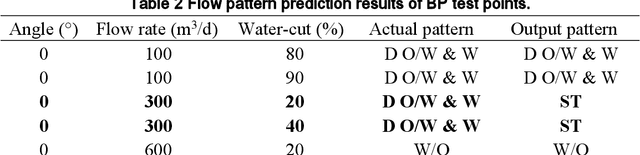
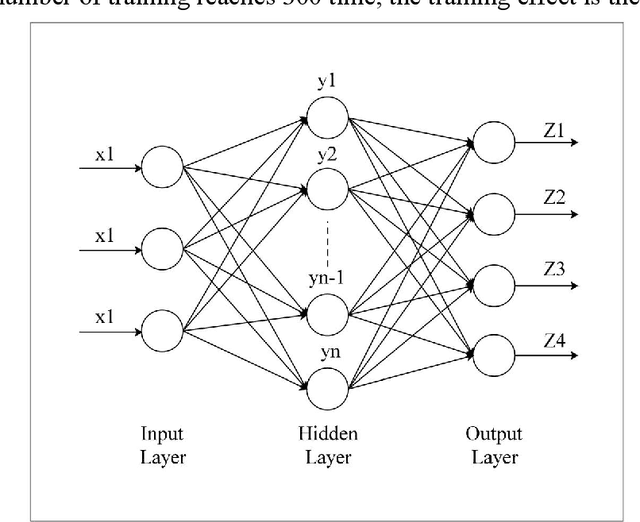
With the continuous development of the petroleum industry, long-distance transportation of oil and gas has been the norm. Due to gravity differentiation in horizontal wells and highly deviated wells (non-vertical wells), the water phase at the bottom of the pipeline will cause scaling and corrosion in the pipeline. Scaling and corrosion will make the transportation process difficult, and transportation costs will be considerably increased. Therefore, the study of the oil-water two-phase flow pattern is of great importance to oil production. In this paper, a fuzzy inference system is used to predict the flow pattern of the fluid, get the prediction result, and compares it with the prediction result of the BP neural network. From the comparison of the results, we found that the prediction results of the fuzzy inference system are more accurate and reliable than the prediction results of the BP neural network. At the same time, it can realize real-time monitoring and has less error control. Experimental results demonstrate that in the entire production logging process of non-vertical wells, the use of a fuzzy inference system to predict fluid flow patterns can greatly save production costs while ensuring the safe operation of production equipment.