 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePAIWorld: A 3D-Consistent World Foundation Model for Robotic Manipulation
Jun 16, 2026World foundation models (WFMs) are powerful simulators, yet they predominantly operate in a single-view setting and lack the multi-view 3D consistency required for robotic manipulation. While robotic systems rely on multiple cameras (egocentric, eye-to-hand, and wrist-mounted) for policy learning, current multi-view world models simply concatenate view tokens without explicit geometric reasoning. This causes cross-view object drift, depth inconsistency, and texture misalignment. We trace these failures to two deficiencies: the absence of an explicit inter-view communication mechanism and the lack of a 3D geometric prior. We argue that resolving both simultaneously is necessary and sufficient. To address this, we present PAIWorld, a framework that augments diffusion-transformer world models via three core components: (1) Geometry-Aware Cross-View Attention blocks that establish an explicit pathway across views, (2) Geometric Rotary Position Embedding that encodes camera ray directions and extrinsic poses into the attention mechanism, and (3) Latent 3D-REPA, which distills 3D-aware features from frozen 3D foundation models to ensure 3D consistency. Built upon a DiT-based world foundation model, PAIWorld achieves state-of-the-art multi-view 3D consistency on robotic manipulation benchmarks, ranking 1st on the WorldArena leaderboard and 2nd on the AgiBot-Challenge2026 leaderboard, while enabling downstream applications such as model-based planning, world action models, and multi-view policy post-training.
AuthSim: Towards Authentic and Effective Safety-critical Scenario Generation for Autonomous Driving Tests
Feb 28, 2025Generating adversarial safety-critical scenarios is a pivotal method for testing autonomous driving systems, as it identifies potential weaknesses and enhances system robustness and reliability. However, existing approaches predominantly emphasize unrestricted collision scenarios, prompting non-player character (NPC) vehicles to attack the ego vehicle indiscriminately. These works overlook these scenarios' authenticity, rationality, and relevance, resulting in numerous extreme, contrived, and largely unrealistic collision events involving aggressive NPC vehicles. To rectify this issue, we propose a three-layer relative safety region model, which partitions the area based on danger levels and increases the likelihood of NPC vehicles entering relative boundary regions. This model directs NPC vehicles to engage in adversarial actions within relatively safe boundary regions, thereby augmenting the scenarios' authenticity. We introduce AuthSim, a comprehensive platform for generating authentic and effective safety-critical scenarios by integrating the three-layer relative safety region model with reinforcement learning. To our knowledge, this is the first attempt to address the authenticity and effectiveness of autonomous driving system test scenarios comprehensively. Extensive experiments demonstrate that AuthSim outperforms existing methods in generating effective safety-critical scenarios. Notably, AuthSim achieves a 5.25% improvement in average cut-in distance and a 27.12% enhancement in average collision interval time, while maintaining higher efficiency in generating effective safety-critical scenarios compared to existing methods. This underscores its significant advantage in producing authentic scenarios over current methodologies.
A Reinforcement Learning Framework with Description Language for Critical Driving Scenario Generation
Sep 21, 2022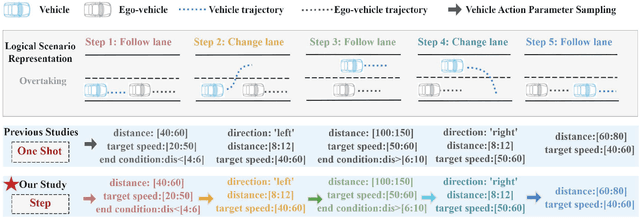
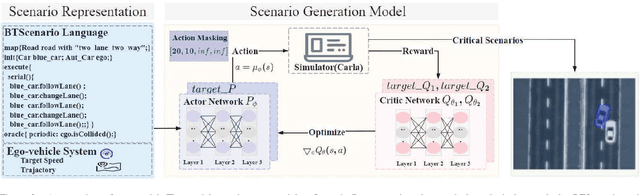
Critical scenario generation requires the ability of finding critical parameter combinations from the infinite parameter space in the logic scenario. Existing solutions aims to explore the correlation of parameters in the initial scenario without considering the connection between the parameters in the action sequence. How to model action sequences and consider the effects of different action parameter in the scenario remains a key challenge to solve the problem. In this paper, we propose a framework to generate critical scenarios for speeding up evaluating specific tasks. Specifically, we first propose a description language, BTScenario, to model the scenario, which contains the map, actors, interactions between actors, and oracles. We then use reinforcement learning to search for combinations of critical parameters. By adopting the action mask, the effects of non-fixed length and sequences in parameter space can be prevented. We demonstrate that the proposed framework is more efficient than random test and combination test methods in various scenarios.
Perspective, Survey and Trends: Public Driving Datasets and Toolsets for Autonomous Driving Virtual Test
Apr 20, 2021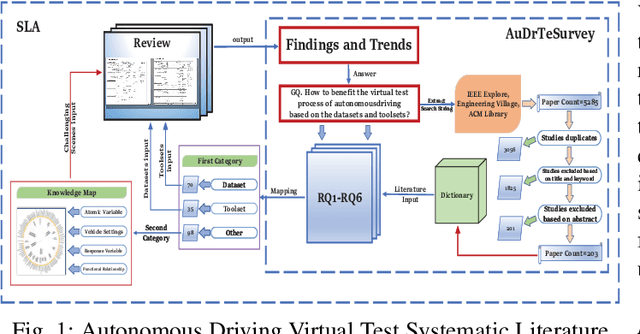
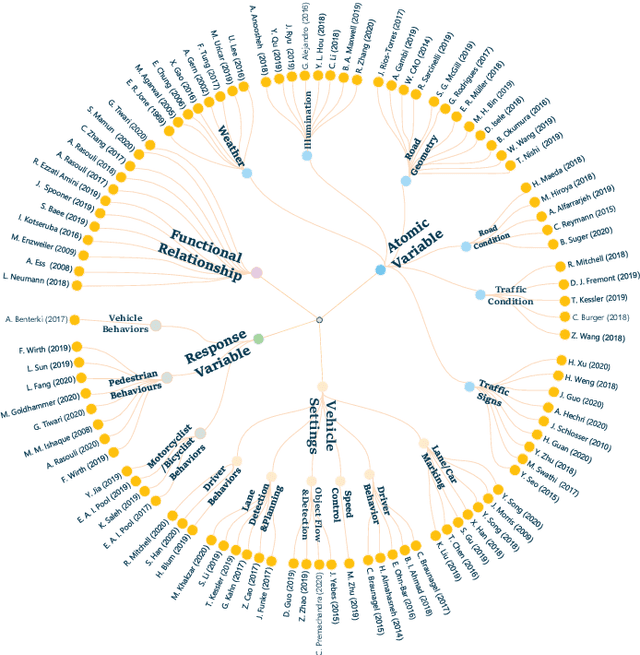
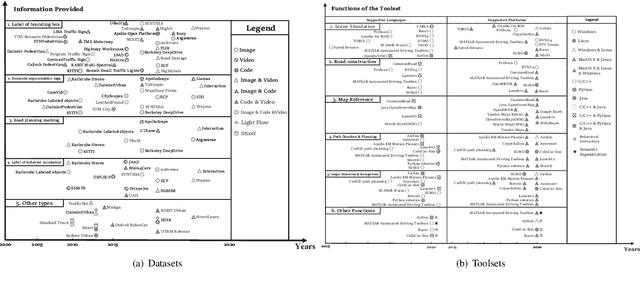
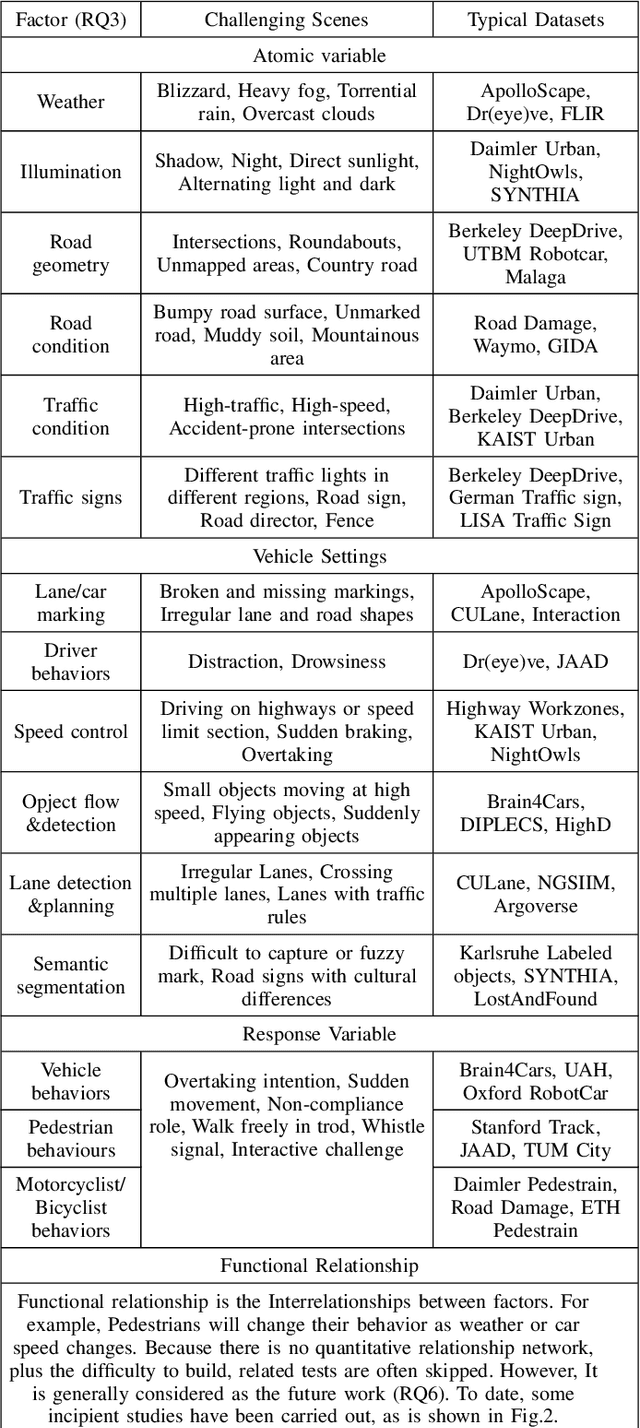
Owing to the merits of early safety and reliability guarantee, autonomous driving virtual testing has recently gains increasing attention compared with closed-loop testing in real scenarios. Although the availability and quality of autonomous driving datasets and toolsets are the premise to diagnose the autonomous driving system bottlenecks and improve the system performance, due to the diversity and privacy of the datasets and toolsets, collecting and featuring the perspective and quality of them become not only time-consuming but also increasingly challenging. This paper first proposes a Systematic Literature review approach for Autonomous driving tests (SLA), then presents an overview of existing publicly available datasets and toolsets from 2000 to 2020. Quantitative findings with the scenarios concerned, perspectives and trend inferences and suggestions with 35 automated driving test tool sets and 70 test data sets are also presented. To the best of our knowledge, we are the first to perform such recent empirical survey on both the datasets and toolsets using a SLA based survey approach. Our multifaceted analyses and new findings not only reveal insights that we believe are useful for system designers, practitioners and users, but also can promote more researches on a systematic survey analysis in autonomous driving surveys on dataset and toolsets.