 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeeing through Light and Darkness: Sensor-Physics Grounded Deblurring HDR NeRF from Single-Exposure Images and Events
Jan 21, 2026Novel view synthesis from low dynamic range (LDR) blurry images, which are common in the wild, struggles to recover high dynamic range (HDR) and sharp 3D representations in extreme lighting conditions. Although existing methods employ event data to address this issue, they ignore the sensor-physics mismatches between the camera output and physical world radiance, resulting in suboptimal HDR and deblurring results. To cope with this problem, we propose a unified sensor-physics grounded NeRF framework for sharp HDR novel view synthesis from single-exposure blurry LDR images and corresponding events. We employ NeRF to directly represent the actual radiance of the 3D scene in the HDR domain and model raw HDR scene rays hitting the sensor pixels as in the physical world. A pixel-wise RGB mapping field is introduced to align the above rendered pixel values with the sensor-recorded LDR pixel values of the input images. A novel event mapping field is also designed to bridge the physical scene dynamics and actual event sensor output. The two mapping fields are jointly optimized with the NeRF network, leveraging the spatial and temporal dynamic information in events to enhance the sharp HDR 3D representation learning. Experiments on the collected and public datasets demonstrate that our method can achieve state-of-the-art deblurring HDR novel view synthesis results with single-exposure blurry LDR images and corresponding events.
E$^3$NeRF: Efficient Event-Enhanced Neural Radiance Fields from Blurry Images
Aug 03, 2024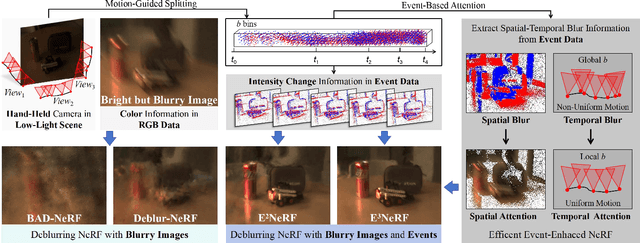
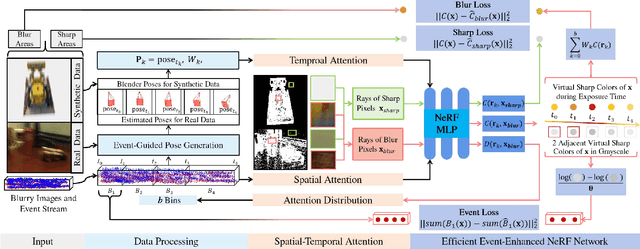

Neural Radiance Fields (NeRF) achieve impressive rendering performance by learning volumetric 3D representation from several images of different views. However, it is difficult to reconstruct a sharp NeRF from blurry input as it often occurs in the wild. To solve this problem, we propose a novel Efficient Event-Enhanced NeRF (E$^3$NeRF) by utilizing the combination of RGB images and event streams. To effectively introduce event streams into the neural volumetric representation learning process, we propose an event-enhanced blur rendering loss and an event rendering loss, which guide the network via modeling the real blur process and event generation process, respectively. Specifically, we leverage spatial-temporal information from the event stream to evenly distribute learning attention over temporal blur while simultaneously focusing on blurry texture through the spatial attention. Moreover, a camera pose estimation framework for real-world data is built with the guidance of the events to generalize the method to practical applications. Compared to previous image-based or event-based NeRF, our framework makes more profound use of the internal relationship between events and images. Extensive experiments on both synthetic data and real-world data demonstrate that E$^3$NeRF can effectively learn a sharp NeRF from blurry images, especially in non-uniform motion and low-light scenes.
Deblurring Neural Radiance Fields with Event-driven Bundle Adjustment
Jun 20, 2024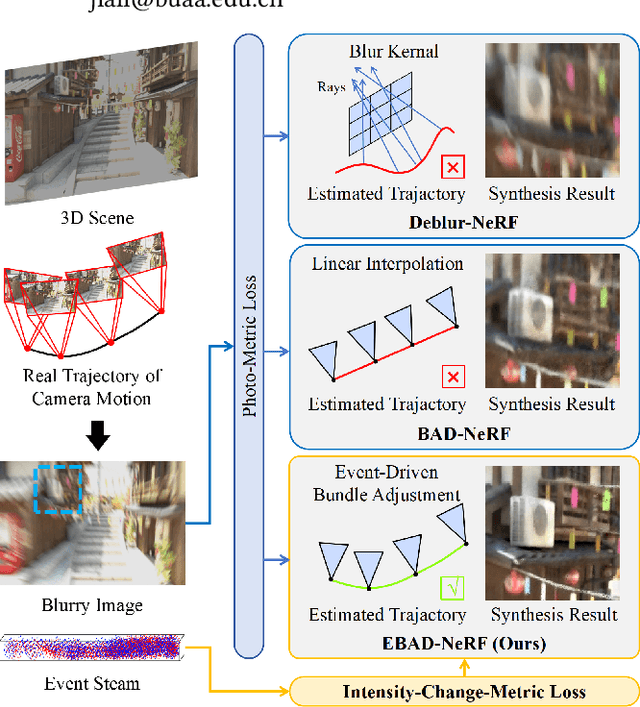
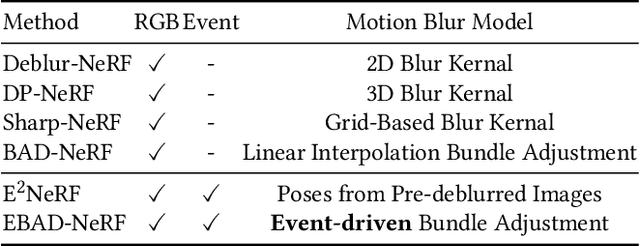

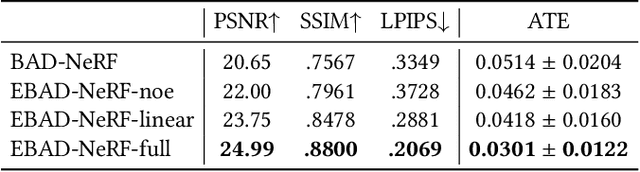
Neural Radiance Fields (NeRF) achieve impressive 3D representation learning and novel view synthesis results with high-quality multi-view images as input. However, motion blur in images often occurs in low-light and high-speed motion scenes, which significantly degrade the reconstruction quality of NeRF. Previous deblurring NeRF methods are struggling to estimate information during the exposure time, unable to accurately model the motion blur. In contrast, the bio-inspired event camera measuring intensity changes with high temporal resolution makes up this information deficiency. In this paper, we propose Event-driven Bundle Adjustment for Deblurring Neural Radiance Fields (EBAD-NeRF) to jointly optimize the learnable poses and NeRF parameters by leveraging the hybrid event-RGB data. An intensity-change-metric event loss and a photo-metric blur loss are introduced to strengthen the explicit modeling of camera motion blur. Experiment results on both synthetic data and real captured data demonstrate that EBAD-NeRF can obtain accurate camera poses during the exposure time and learn sharper 3D representations compared to prior works.
SpikeNeRF: Learning Neural Radiance Fields from Continuous Spike Stream
Mar 17, 2024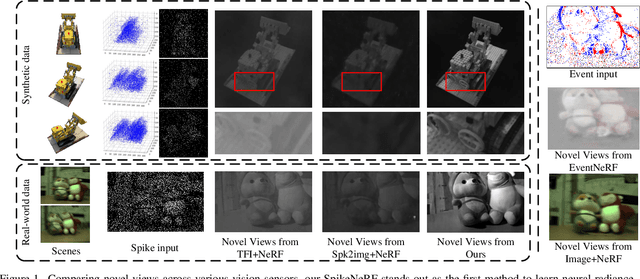
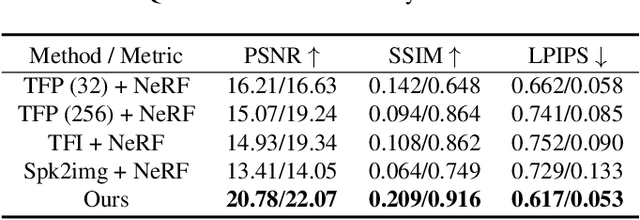
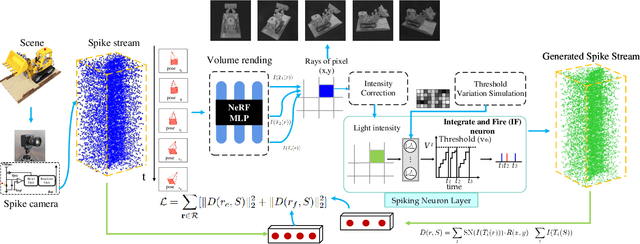
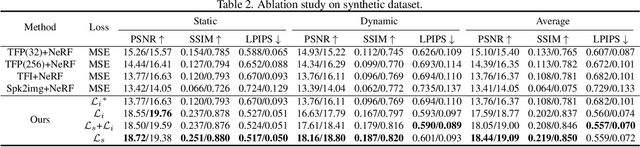
Spike cameras, leveraging spike-based integration sampling and high temporal resolution, offer distinct advantages over standard cameras. However, existing approaches reliant on spike cameras often assume optimal illumination, a condition frequently unmet in real-world scenarios. To address this, we introduce SpikeNeRF, the first work that derives a NeRF-based volumetric scene representation from spike camera data. Our approach leverages NeRF's multi-view consistency to establish robust self-supervision, effectively eliminating erroneous measurements and uncovering coherent structures within exceedingly noisy input amidst diverse real-world illumination scenarios. The framework comprises two core elements: a spike generation model incorporating an integrate-and-fire neuron layer and parameters accounting for non-idealities, such as threshold variation, and a spike rendering loss capable of generalizing across varying illumination conditions. We describe how to effectively optimize neural radiance fields to render photorealistic novel views from the novel continuous spike stream, demonstrating advantages over other vision sensors in certain scenes. Empirical evaluations conducted on both real and novel realistically simulated sequences affirm the efficacy of our methodology. The dataset and source code are released at https://github.com/BIT-Vision/SpikeNeRF.