 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging Labelled Data Knowledge: A Cooperative Rectification Learning Network for Semi-supervised 3D Medical Image Segmentation
Feb 17, 2025Semi-supervised 3D medical image segmentation aims to achieve accurate segmentation using few labelled data and numerous unlabelled data. The main challenge in the design of semi-supervised learning methods consists in the effective use of the unlabelled data for training. A promising solution consists of ensuring consistent predictions across different views of the data, where the efficacy of this strategy depends on the accuracy of the pseudo-labels generated by the model for this consistency learning strategy. In this paper, we introduce a new methodology to produce high-quality pseudo-labels for a consistency learning strategy to address semi-supervised 3D medical image segmentation. The methodology has three important contributions. The first contribution is the Cooperative Rectification Learning Network (CRLN) that learns multiple prototypes per class to be used as external knowledge priors to adaptively rectify pseudo-labels at the voxel level. The second contribution consists of the Dynamic Interaction Module (DIM) to facilitate pairwise and cross-class interactions between prototypes and multi-resolution image features, enabling the production of accurate voxel-level clues for pseudo-label rectification. The third contribution is the Cooperative Positive Supervision (CPS), which optimises uncertain representations to align with unassertive representations of their class distributions, improving the model's accuracy in classifying uncertain regions. Extensive experiments on three public 3D medical segmentation datasets demonstrate the effectiveness and superiority of our semi-supervised learning method.
Vector Detection Network: An Application Study on Robots Reading Analog Meters in the Wild
May 30, 2021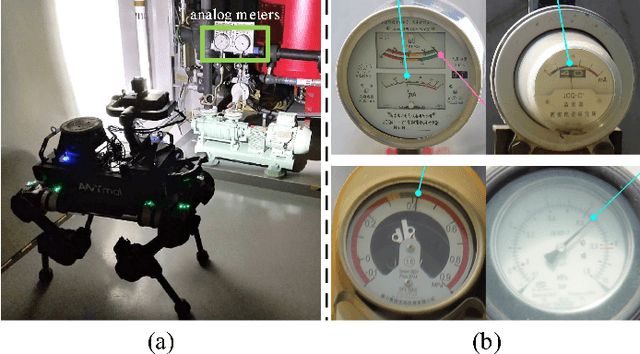
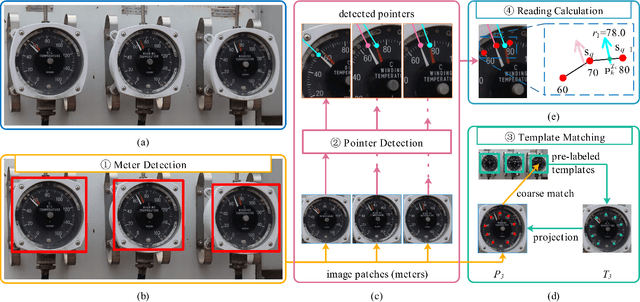
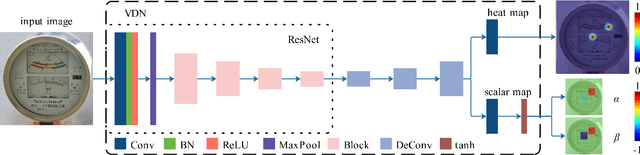
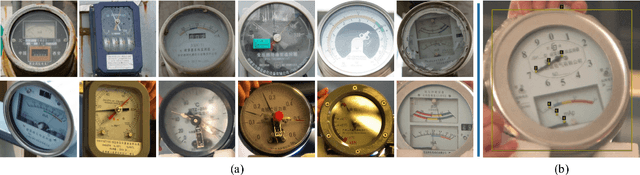
Analog meters equipped with one or multiple pointers are wildly utilized to monitor vital devices' status in industrial sites for safety concerns. Reading these legacy meters {\bi autonomously} remains an open problem since estimating pointer origin and direction under imaging damping factors imposed in the wild could be challenging. Nevertheless, high accuracy, flexibility, and real-time performance are demanded. In this work, we propose the Vector Detection Network (VDN) to detect analog meters' pointers given their images, eliminating the barriers for autonomously reading such meters using intelligent agents like robots. We tackled the pointer as a two-dimensional vector, whose initial point coincides with the tip, and the direction is along tail-to-tip. The network estimates a confidence map, wherein the peak pixels are treated as vectors' initial points, along with a two-layer scalar map, whose pixel values at each peak form the scalar components in the directions of the coordinate axes. We established the Pointer-10K dataset composing of real-world analog meter images to evaluate our approach due to no similar dataset is available for now. Experiments on the dataset demonstrated that our methods generalize well to various meters, robust to harsh imaging factors, and run in real-time.