 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProhibited Items Segmentation via Occlusion-aware Bilayer Modeling
Jun 13, 2025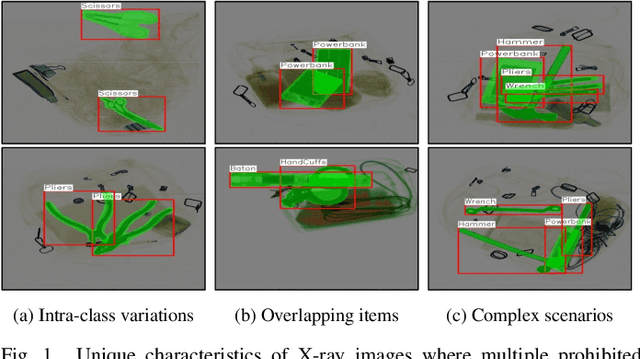
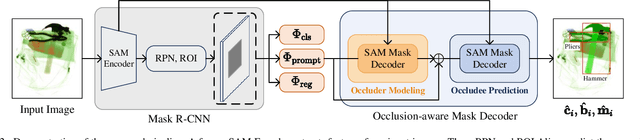
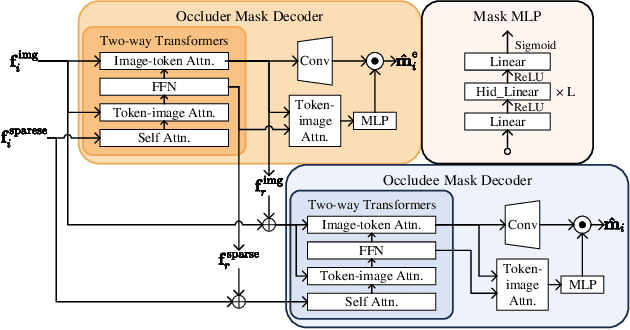
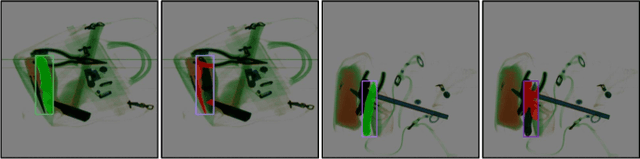
Instance segmentation of prohibited items in security X-ray images is a critical yet challenging task. This is mainly caused by the significant appearance gap between prohibited items in X-ray images and natural objects, as well as the severe overlapping among objects in X-ray images. To address these issues, we propose an occlusion-aware instance segmentation pipeline designed to identify prohibited items in X-ray images. Specifically, to bridge the representation gap, we integrate the Segment Anything Model (SAM) into our pipeline, taking advantage of its rich priors and zero-shot generalization capabilities. To address the overlap between prohibited items, we design an occlusion-aware bilayer mask decoder module that explicitly models the occlusion relationships. To supervise occlusion estimation, we manually annotated occlusion areas of prohibited items in two large-scale X-ray image segmentation datasets, PIDray and PIXray. We then reorganized these additional annotations together with the original information as two occlusion-annotated datasets, PIDray-A and PIXray-A. Extensive experimental results on these occlusion-annotated datasets demonstrate the effectiveness of our proposed method. The datasets and codes are available at: https://github.com/Ryh1218/Occ
Few-shot Object Localization
Mar 24, 2024Existing object localization methods are tailored to locate a specific class of objects, relying on abundant labeled data for model optimization. However, in numerous real-world scenarios, acquiring large labeled data can be arduous, significantly constraining the broader application of localization models. To bridge this research gap, this paper proposes the novel task of Few-Shot Object Localization (FSOL), which seeks to achieve precise localization with limited samples available. This task achieves generalized object localization by leveraging a small number of labeled support samples to query the positional information of objects within corresponding images. To advance this research field, we propose an innovative high-performance baseline model. Our model integrates a dual-path feature augmentation module to enhance shape association and gradient differences between supports and query images, alongside a self query module designed to explore the association between feature maps and query images. Experimental results demonstrate a significant performance improvement of our approach in the FSOL task, establishing an efficient benchmark for further research. All codes and data are available at https://github.com/Ryh1218/FSOL.