 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Learning for Crack Detection: A Review of Learning Paradigms, Generalizability, and Datasets
Aug 14, 2025Crack detection plays a crucial role in civil infrastructures, including inspection of pavements, buildings, etc., and deep learning has significantly advanced this field in recent years. While numerous technical and review papers exist in this domain, emerging trends are reshaping the landscape. These shifts include transitions in learning paradigms (from fully supervised learning to semi-supervised, weakly-supervised, unsupervised, few-shot, domain adaptation and fine-tuning foundation models), improvements in generalizability (from single-dataset performance to cross-dataset evaluation), and diversification in dataset reacquisition (from RGB images to specialized sensor-based data). In this review, we systematically analyze these trends and highlight representative works. Additionally, we introduce a new dataset collected with 3D laser scans, 3DCrack, to support future research and conduct extensive benchmarking experiments to establish baselines for commonly used deep learning methodologies, including recent foundation models. Our findings provide insights into the evolving methodologies and future directions in deep learning-based crack detection. Project page: https://github.com/nantonzhang/Awesome-Crack-Detection
Ensemble-based Transfer Learning for Low-resource Machine Translation Quality Estimation
May 17, 2021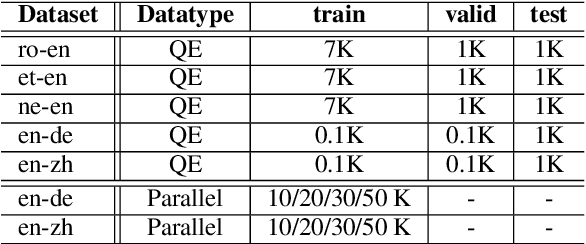

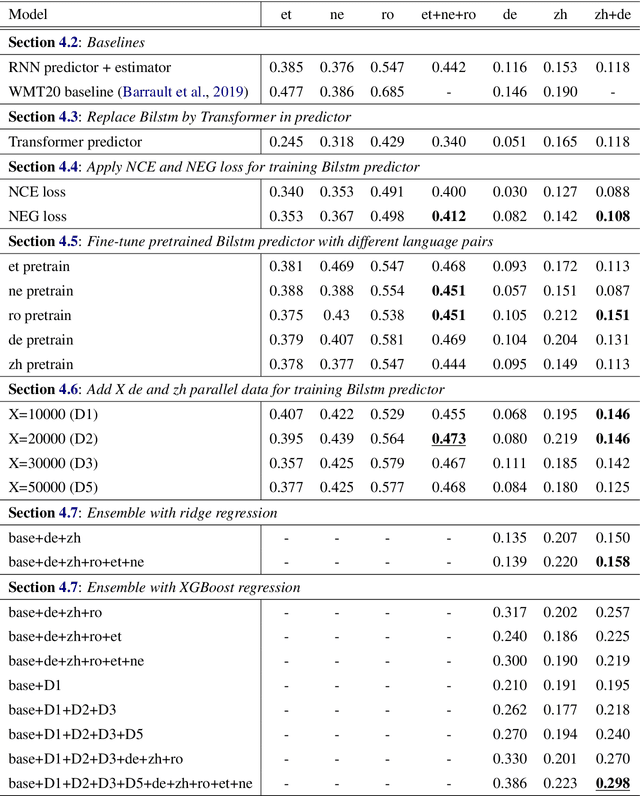
Quality Estimation (QE) of Machine Translation (MT) is a task to estimate the quality scores for given translation outputs from an unknown MT system. However, QE scores for low-resource languages are usually intractable and hard to collect. In this paper, we focus on the Sentence-Level QE Shared Task of the Fifth Conference on Machine Translation (WMT20), but in a more challenging setting. We aim to predict QE scores of given translation outputs when barely none of QE scores of that paired languages are given during training. We propose an ensemble-based predictor-estimator QE model with transfer learning to overcome such QE data scarcity challenge by leveraging QE scores from other miscellaneous languages and translation results of targeted languages. Based on the evaluation results, we provide a detailed analysis of how each of our extension affects QE models on the reliability and the generalization ability to perform transfer learning under multilingual tasks. Finally, we achieve the best performance on the ensemble model combining the models pretrained by individual languages as well as different levels of parallel trained corpus with a Pearson's correlation of 0.298, which is 2.54 times higher than baselines.
Interpretable Self-Attention Temporal Reasoning for Driving Behavior Understanding
Nov 06, 2019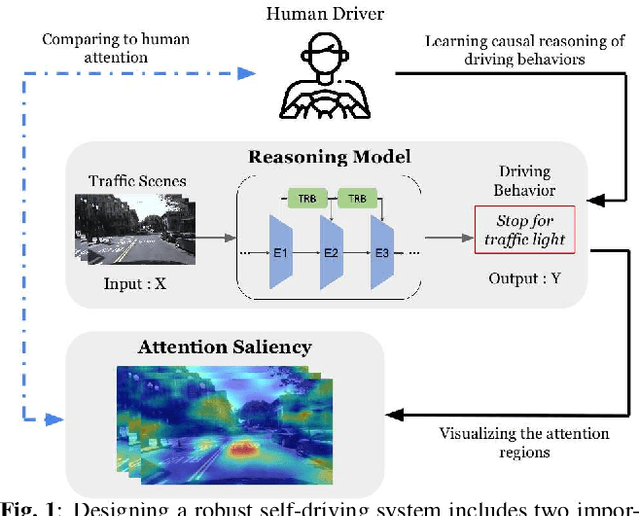
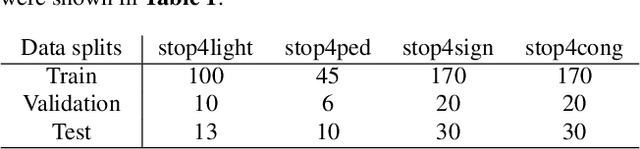
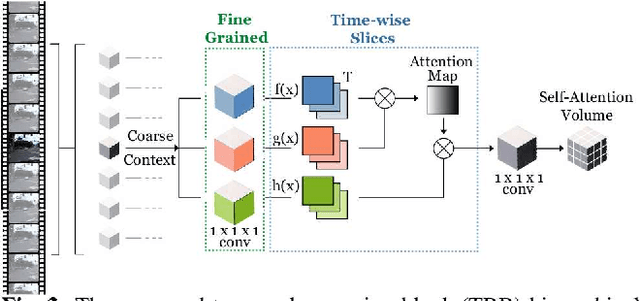
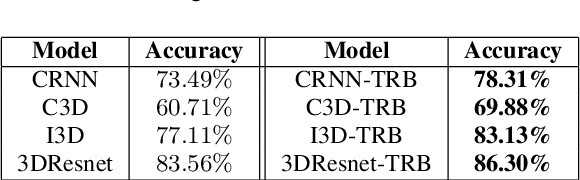
Performing driving behaviors based on causal reasoning is essential to ensure driving safety. In this work, we investigated how state-of-the-art 3D Convolutional Neural Networks (CNNs) perform on classifying driving behaviors based on causal reasoning. We proposed a perturbation-based visual explanation method to inspect the models' performance visually. By examining the video attention saliency, we found that existing models could not precisely capture the causes (e.g., traffic light) of the specific action (e.g., stopping). Therefore, the Temporal Reasoning Block (TRB) was proposed and introduced to the models. With the TRB models, we achieved the accuracy of $\mathbf{86.3\%}$, which outperform the state-of-the-art 3D CNNs from previous works. The attention saliency also demonstrated that TRB helped models focus on the causes more precisely. With both numerical and visual evaluations, we concluded that our proposed TRB models were able to provide accurate driving behavior prediction by learning the causal reasoning of the behaviors.