 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Visual-Inertial System: Analysis, Calibration and Estimation
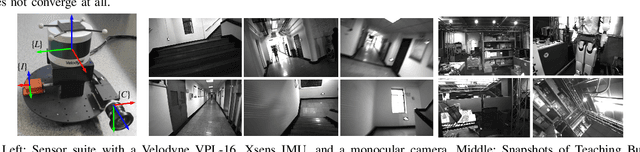
Aug 18, 2023In this paper, we study state estimation of multi-visual-inertial systems (MVIS) and develop sensor fusion algorithms to optimally fuse an arbitrary number of asynchronous inertial measurement units (IMUs) or gyroscopes and global and(or) rolling shutter cameras. We are especially interested in the full calibration of the associated visual-inertial sensors, including the IMU or camera intrinsics and the IMU-IMU(or camera) spatiotemporal extrinsics as well as the image readout time of rolling-shutter cameras (if used). To this end, we develop a new analytic combined IMU integration with intrinsics-termed ACI3-to preintegrate IMU measurements, which is leveraged to fuse auxiliary IMUs and(or) gyroscopes alongside a base IMU. We model the multi-inertial measurements to include all the necessary inertial intrinsic and IMU-IMU spatiotemporal extrinsic parameters, while leveraging IMU-IMU rigid-body constraints to eliminate the necessity of auxiliary inertial poses and thus reducing computational complexity. By performing observability analysis of MVIS, we prove that the standard four unobservable directions remain - no matter how many inertial sensors are used, and also identify, for the first time, degenerate motions for IMU-IMU spatiotemporal extrinsics and auxiliary inertial intrinsics. In addition to the extensive simulations that validate our analysis and algorithms, we have built our own MVIS sensor rig and collected over 25 real-world datasets to experimentally verify the proposed calibration against the state-of-the-art calibration method such as Kalibr. We show that the proposed MVIS calibration is able to achieve competing accuracy with improved convergence and repeatability, which is open sourced to better benefit the community.
Online Self-Calibration for Visual-Inertial Navigation Systems: Models, Analysis and Degeneracy
Jan 29, 2022
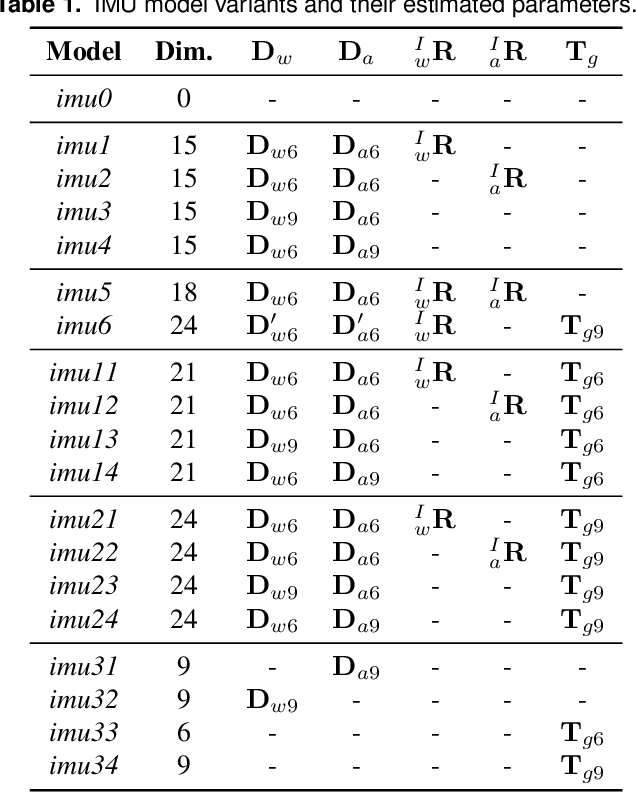

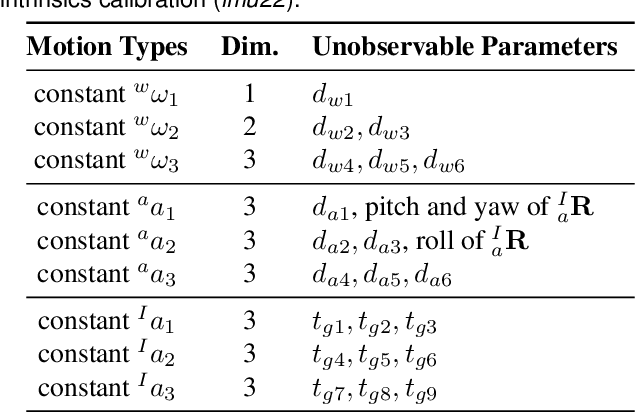
In this paper, we study in-depth the problem of online self-calibration for robust and accurate visual-inertial state estimation. In particular, we first perform a complete observability analysis for visual-inertial navigation systems (VINS) with full calibration of sensing parameters, including IMU and camera intrinsics and IMU-camera spatial-temporal extrinsic calibration, along with readout time of rolling shutter (RS) cameras (if used). We investigate different inertial model variants containing IMU intrinsic parameters that encompass most commonly used models for low-cost inertial sensors. The observability analysis results prove that VINS with full sensor calibration has four unobservable directions, corresponding to the system's global yaw and translation, while all sensor calibration parameters are observable given fully-excited 6-axis motion. Moreover, we, for the first time, identify primitive degenerate motions for IMU and camera intrinsic calibration. Each degenerate motion profile will cause a set of calibration parameters to be unobservable and any combination of these degenerate motions are still degenerate. Extensive Monte-Carlo simulations and real-world experiments are performed to validate both the observability analysis and identified degenerate motions, showing that online self-calibration improves system accuracy and robustness to calibration inaccuracies. We compare the proposed online self-calibration on commonly-used IMUs against the state-of-art offline calibration toolbox Kalibr, and show that the proposed system achieves better consistency and repeatability. Based on our analysis and experimental evaluations, we also provide practical guidelines for how to perform online IMU-camera sensor self-calibration.
LIC-Fusion 2.0: LiDAR-Inertial-Camera Odometry with Sliding-Window Plane-Feature Tracking
Aug 17, 2020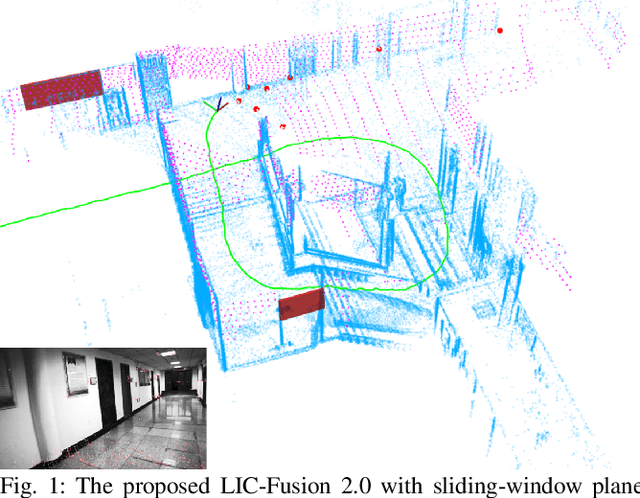
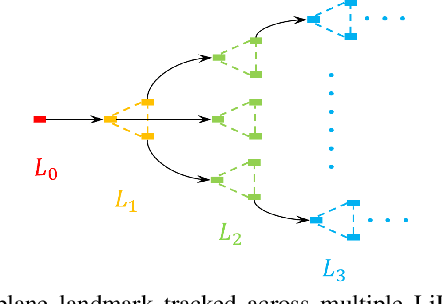

Multi-sensor fusion of multi-modal measurements from commodity inertial, visual and LiDAR sensors to provide robust and accurate 6DOF pose estimation holds great potential in robotics and beyond. In this paper, building upon our prior work (i.e., LIC-Fusion), we develop a sliding-window filter based LiDAR-Inertial-Camera odometry with online spatiotemporal calibration (i.e., LIC-Fusion 2.0), which introduces a novel sliding-window plane-feature tracking for efficiently processing 3D LiDAR point clouds. In particular, after motion compensation for LiDAR points by leveraging IMU data, low-curvature planar points are extracted and tracked across the sliding window. A novel outlier rejection criterion is proposed in the plane-feature tracking for high-quality data association. Only the tracked planar points belonging to the same plane will be used for plane initialization, which makes the plane extraction efficient and robust. Moreover, we perform the observability analysis for the LiDAR-IMU subsystem and report the degenerate cases for spatiotemporal calibration using plane features. While the estimation consistency and identified degenerate motions are validated in Monte-Carlo simulations, different real-world experiments are also conducted to show that the proposed LIC-Fusion 2.0 outperforms its predecessor and other state-of-the-art methods.
Observability Analysis of Aided INS with Heterogeneous Features of Points, Lines and Planes
May 12, 2018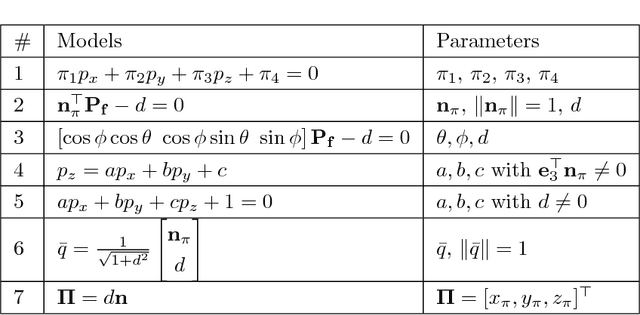
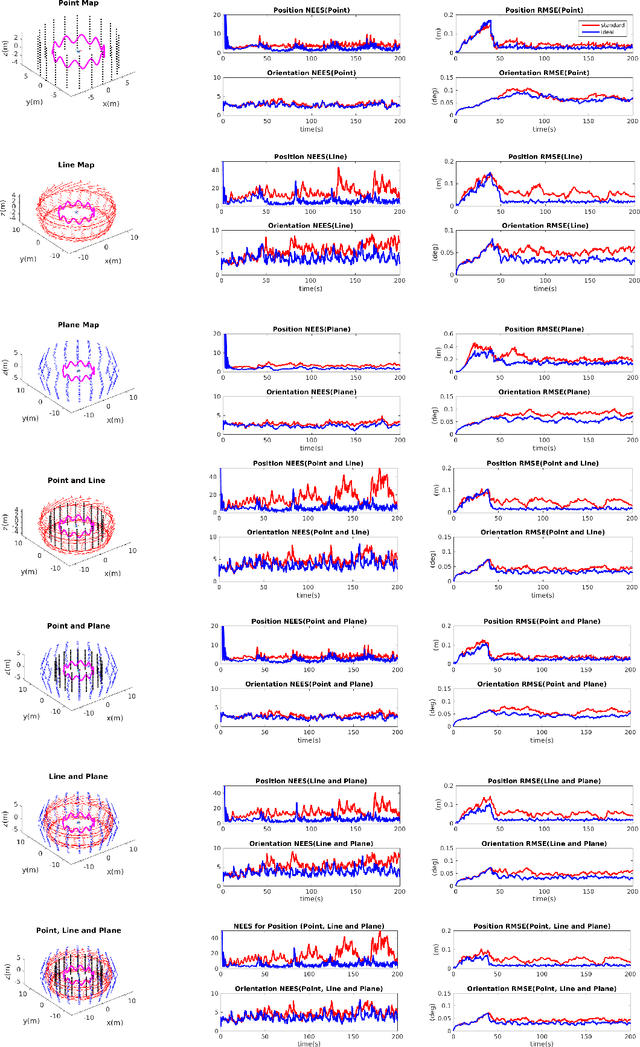
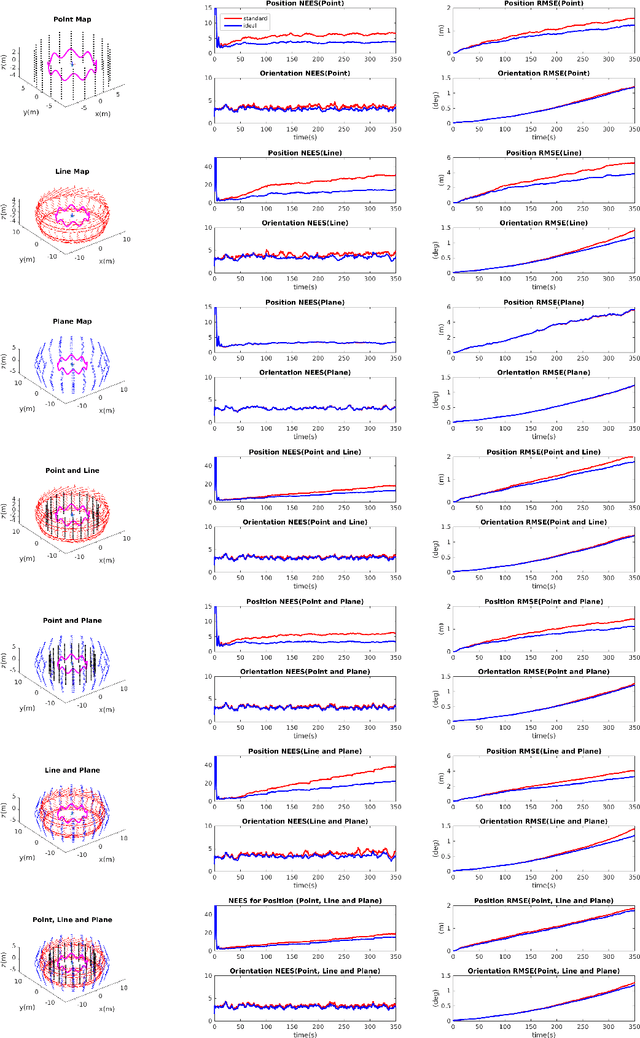
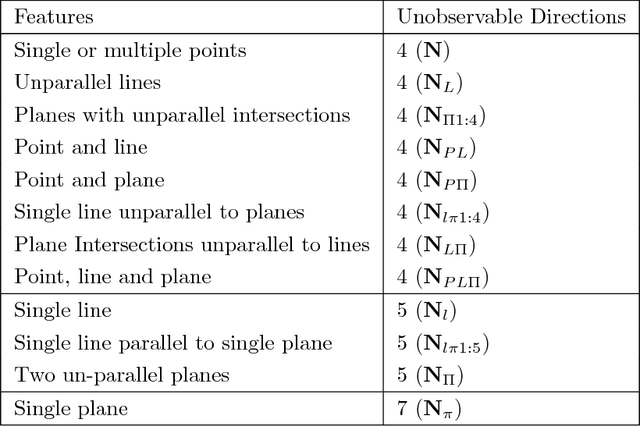
In this paper, we perform a thorough observability analysis for linearized inertial navigation systems (INS) aided by exteroceptive range and/or bearing sensors (such as cameras, LiDAR and sonars) with different geometric features (points, lines and planes). While the observability of vision-aided INS (VINS) with point features has been extensively studied in the literature, we analytically show that the general aided INS with point features preserves the same observability property: that is, 4 unobservable directions, corresponding to the global yaw and the global position of the sensor platform. We further prove that there are at least 5 (and 7) unobservable directions for the linearized aided INS with a single line (and plane) feature; and, for the first time, analytically derive the unobservable subspace for the case of multiple lines/planes. Building upon this, we examine the system observability of the linearized aided INS with different combinations of points, lines and planes, and show that, in general, the system preserves at least 4 unobservable directions, while if global measurements are available, as expected, some unobservable directions diminish. In particular, when using plane features, we propose to use a minimal, closest point (CP) representation; and we also study in-depth the effects of 5 degenerate motions identified on observability. To numerically validate our analysis, we develop and evaluate both EKF-based visual-inertial SLAM and visual-inertial odometry (VIO) using heterogeneous geometric features in Monte Carlo simulations.