 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnvisioning global urban development with satellite imagery and generative AI
Mar 27, 2026Urban development has been a defining force in human history, shaping cities for centuries. However, past studies mostly analyze such development as predictive tasks, failing to reflect its generative nature. Therefore, this study designs a multimodal generative AI framework to envision sustainable urban development at a global scale. By integrating prompts and geospatial controls, our framework can generate high-fidelity, diverse, and realistic urban satellite imagery across the 500 largest metropolitan areas worldwide. It enables users to specify urban development goals, creating new images that align with them while offering diverse scenarios whose appearance can be controlled with text prompts and geospatial constraints. It also facilitates urban redevelopment practices by learning from the surrounding environment. Beyond visual synthesis, we find that it encodes and interprets latent representations of urban form for global cross-city learning, successfully transferring styles of urban environments across a global spatial network. The latent representations can also enhance downstream prediction tasks such as carbon emission prediction. Further, human expert evaluation confirms that our generated urban images are comparable to real urban images. Overall, this study presents innovative approaches for accelerated urban planning and supports scenario-based planning processes for worldwide cities.
Generative AI for Urban Design: A Stepwise Approach Integrating Human Expertise with Multimodal Diffusion Models
May 30, 2025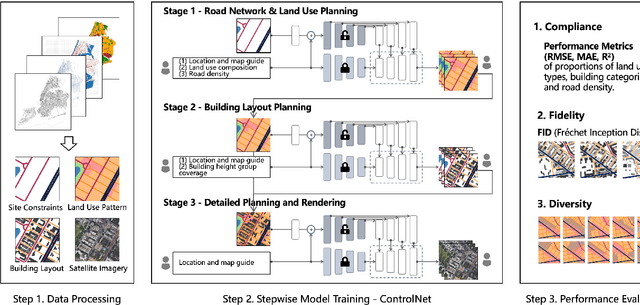
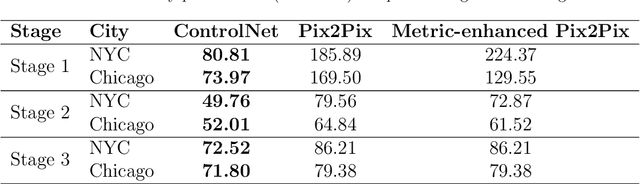
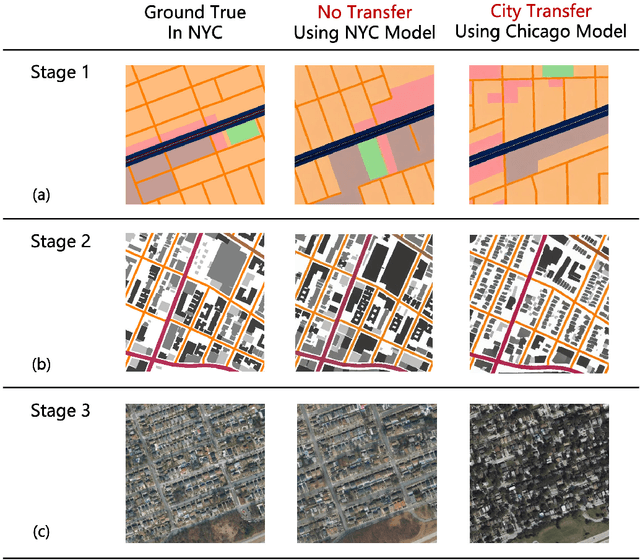
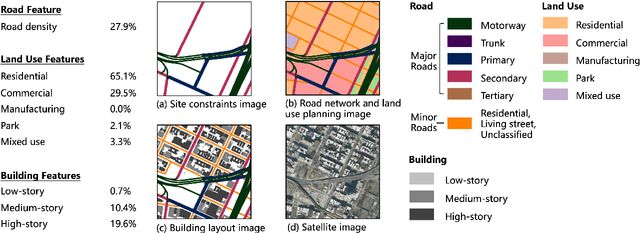
Urban design is a multifaceted process that demands careful consideration of site-specific constraints and collaboration among diverse professionals and stakeholders. The advent of generative artificial intelligence (GenAI) offers transformative potential by improving the efficiency of design generation and facilitating the communication of design ideas. However, most existing approaches are not well integrated with human design workflows. They often follow end-to-end pipelines with limited control, overlooking the iterative nature of real-world design. This study proposes a stepwise generative urban design framework that integrates multimodal diffusion models with human expertise to enable more adaptive and controllable design processes. Instead of generating design outcomes in a single end-to-end process, the framework divides the process into three key stages aligned with established urban design workflows: (1) road network and land use planning, (2) building layout planning, and (3) detailed planning and rendering. At each stage, multimodal diffusion models generate preliminary designs based on textual prompts and image-based constraints, which can then be reviewed and refined by human designers. We design an evaluation framework to assess the fidelity, compliance, and diversity of the generated designs. Experiments using data from Chicago and New York City demonstrate that our framework outperforms baseline models and end-to-end approaches across all three dimensions. This study underscores the benefits of multimodal diffusion models and stepwise generation in preserving human control and facilitating iterative refinements, laying the groundwork for human-AI interaction in urban design solutions.
Generative AI for Urban Planning: Synthesizing Satellite Imagery via Diffusion Models
May 13, 2025
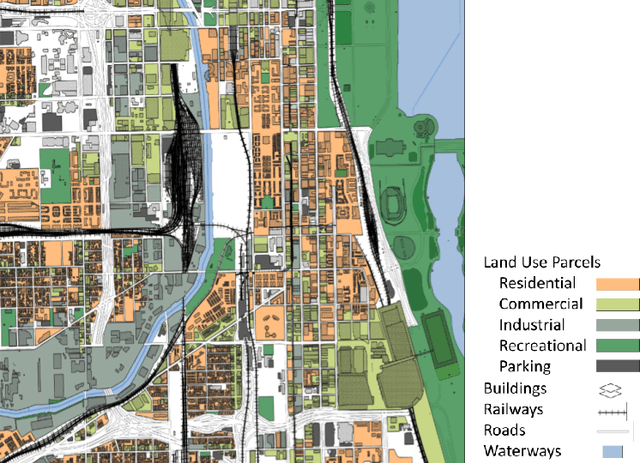
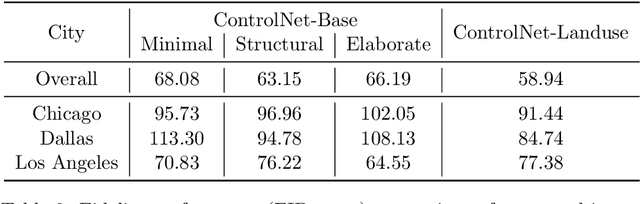
Generative AI offers new opportunities for automating urban planning by creating site-specific urban layouts and enabling flexible design exploration. However, existing approaches often struggle to produce realistic and practical designs at scale. Therefore, we adapt a state-of-the-art Stable Diffusion model, extended with ControlNet, to generate high-fidelity satellite imagery conditioned on land use descriptions, infrastructure, and natural environments. To overcome data availability limitations, we spatially link satellite imagery with structured land use and constraint information from OpenStreetMap. Using data from three major U.S. cities, we demonstrate that the proposed diffusion model generates realistic and diverse urban landscapes by varying land-use configurations, road networks, and water bodies, facilitating cross-city learning and design diversity. We also systematically evaluate the impacts of varying language prompts and control imagery on the quality of satellite imagery generation. Our model achieves high FID and KID scores and demonstrates robustness across diverse urban contexts. Qualitative assessments from urban planners and the general public show that generated images align closely with design descriptions and constraints, and are often preferred over real images. This work establishes a benchmark for controlled urban imagery generation and highlights the potential of generative AI as a tool for enhancing planning workflows and public engagement.
Analyzing sequential activity and travel decisions with interpretable deep inverse reinforcement learning
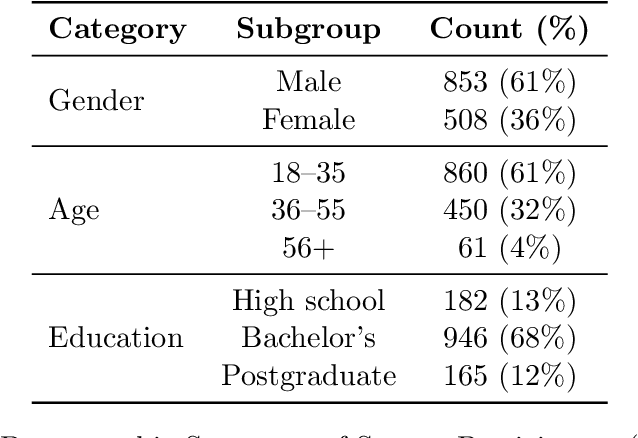
Mar 17, 2025Travel demand modeling has shifted from aggregated trip-based models to behavior-oriented activity-based models because daily trips are essentially driven by human activities. To analyze the sequential activity-travel decisions, deep inverse reinforcement learning (DIRL) has proven effective in learning the decision mechanisms by approximating a reward function to represent preferences and a policy function to replicate observed behavior using deep neural networks (DNNs). However, most existing research has focused on using DIRL to enhance only prediction accuracy, with limited exploration into interpreting the underlying decision mechanisms guiding sequential decision-making. To address this gap, we introduce an interpretable DIRL framework for analyzing activity-travel decision processes, bridging the gap between data-driven machine learning and theory-driven behavioral models. Our proposed framework adapts an adversarial IRL approach to infer the reward and policy functions of activity-travel behavior. The policy function is interpreted through a surrogate interpretable model based on choice probabilities from the policy function, while the reward function is interpreted by deriving both short-term rewards and long-term returns for various activity-travel patterns. Our analysis of real-world travel survey data reveals promising results in two key areas: (i) behavioral pattern insights from the policy function, highlighting critical factors in decision-making and variations among socio-demographic groups, and (ii) behavioral preference insights from the reward function, indicating the utility individuals gain from specific activity sequences.
Exploring Large Language Models for Human Mobility Prediction under Public Events
Nov 29, 2023Public events, such as concerts and sports games, can be major attractors for large crowds, leading to irregular surges in travel demand. Accurate human mobility prediction for public events is thus crucial for event planning as well as traffic or crowd management. While rich textual descriptions about public events are commonly available from online sources, it is challenging to encode such information in statistical or machine learning models. Existing methods are generally limited in incorporating textual information, handling data sparsity, or providing rationales for their predictions. To address these challenges, we introduce a framework for human mobility prediction under public events (LLM-MPE) based on Large Language Models (LLMs), leveraging their unprecedented ability to process textual data, learn from minimal examples, and generate human-readable explanations. Specifically, LLM-MPE first transforms raw, unstructured event descriptions from online sources into a standardized format, and then segments historical mobility data into regular and event-related components. A prompting strategy is designed to direct LLMs in making and rationalizing demand predictions considering historical mobility and event features. A case study is conducted for Barclays Center in New York City, based on publicly available event information and taxi trip data. Results show that LLM-MPE surpasses traditional models, particularly on event days, with textual data significantly enhancing its accuracy. Furthermore, LLM-MPE offers interpretable insights into its predictions. Despite the great potential of LLMs, we also identify key challenges including misinformation and high costs that remain barriers to their broader adoption in large-scale human mobility analysis.
Deep trip generation with graph neural networks for bike sharing system expansion
Mar 20, 2023



Bike sharing is emerging globally as an active, convenient, and sustainable mode of transportation. To plan successful bike-sharing systems (BSSs), many cities start from a small-scale pilot and gradually expand the system to cover more areas. For station-based BSSs, this means planning new stations based on existing ones over time, which requires prediction of the number of trips generated by these new stations across the whole system. Previous studies typically rely on relatively simple regression or machine learning models, which are limited in capturing complex spatial relationships. Despite the growing literature in deep learning methods for travel demand prediction, they are mostly developed for short-term prediction based on time series data, assuming no structural changes to the system. In this study, we focus on the trip generation problem for BSS expansion, and propose a graph neural network (GNN) approach to predicting the station-level demand based on multi-source urban built environment data. Specifically, it constructs multiple localized graphs centered on each target station and uses attention mechanisms to learn the correlation weights between stations. We further illustrate that the proposed approach can be regarded as a generalized spatial regression model, indicating the commonalities between spatial regression and GNNs. The model is evaluated based on realistic experiments using multi-year BSS data from New York City, and the results validate the superior performance of our approach compared to existing methods. We also demonstrate the interpretability of the model for uncovering the effects of built environment features and spatial interactions between stations, which can provide strategic guidance for BSS station location selection and capacity planning.
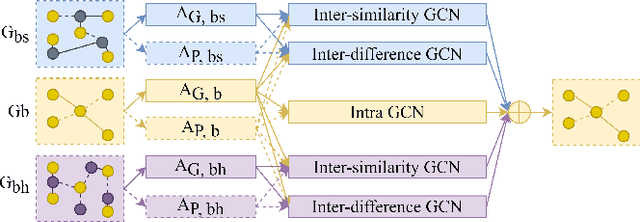
Cross-Mode Knowledge Adaptation for Bike Sharing Demand Prediction using Domain-Adversarial Graph Neural Networks
Nov 16, 2022



For bike sharing systems, demand prediction is crucial to ensure the timely re-balancing of available bikes according to predicted demand. Existing methods for bike sharing demand prediction are mostly based on its own historical demand variation, essentially regarding it as a closed system and neglecting the interaction between different transportation modes. This is particularly important for bike sharing because it is often used to complement travel through other modes (e.g., public transit). Despite some recent progress, no existing method is capable of leveraging spatiotemporal information from multiple modes and explicitly considers the distribution discrepancy between them, which can easily lead to negative transfer. To address these challenges, this study proposes a domain-adversarial multi-relational graph neural network (DA-MRGNN) for bike sharing demand prediction with multimodal historical data as input. A temporal adversarial adaptation network is introduced to extract shareable features from demand patterns of different modes. To capture correlations between spatial units across modes, we adapt a multi-relational graph neural network (MRGNN) considering both cross-mode similarity and difference. In addition, an explainable GNN technique is developed to understand how our proposed model makes predictions. Extensive experiments are conducted using real-world bike sharing, subway and ride-hailing data from New York City. The results demonstrate the superior performance of our proposed approach compared to existing methods and the effectiveness of different model components.
Deep Inverse Reinforcement Learning for Route Choice Modeling
Jun 18, 2022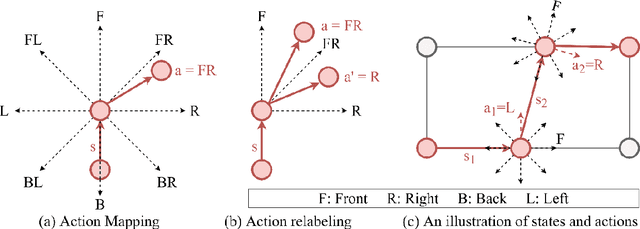

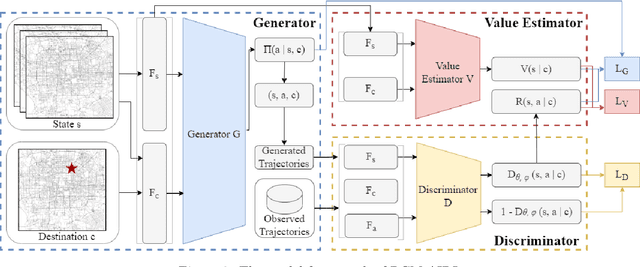
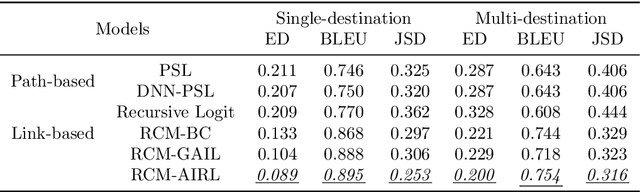
Route choice modeling, i.e., the process of estimating the likely path that individuals follow during their journeys, is a fundamental task in transportation planning and demand forecasting. Classical methods generally adopt the discrete choice model (DCM) framework with linear utility functions and high-level route characteristics. While several recent studies have started to explore the applicability of deep learning for travel choice modeling, they are all path-based with relatively simple model architectures and cannot take advantage of detailed link-level features. Existing link-based models, while theoretically promising, are generally not as scalable or flexible enough to account for the destination characteristics. To address these issues, this study proposes a general deep inverse reinforcement learning (IRL) framework for link-based route choice modeling, which is capable of incorporating high-dimensional features and capturing complex relationships. Specifically, we adapt an adversarial IRL model to the route choice problem for efficient estimation of destination-dependent reward and policy functions. Experiment results based on taxi GPS data from Shanghai, China validate the improved performance of the proposed model over conventional DCMs and other imitation learning baselines, even for destinations unseen in the training data. We also demonstrate the model interpretability using explainable AI techniques. The proposed methodology provides a new direction for future development of route choice models. It is general and should be adaptable to other route choice problems across different modes and networks.
Bike Sharing Demand Prediction based on Knowledge Sharing across Modes: A Graph-based Deep Learning Approach
Mar 18, 2022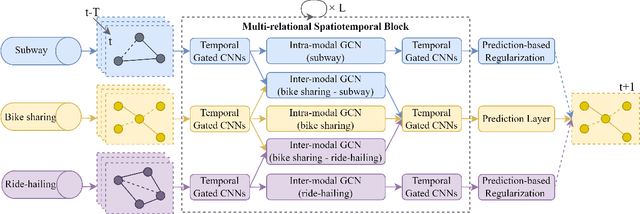
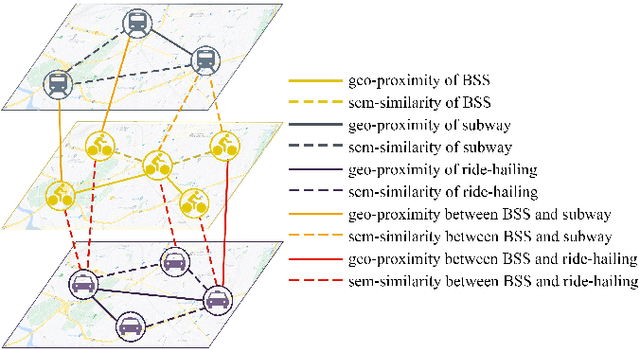
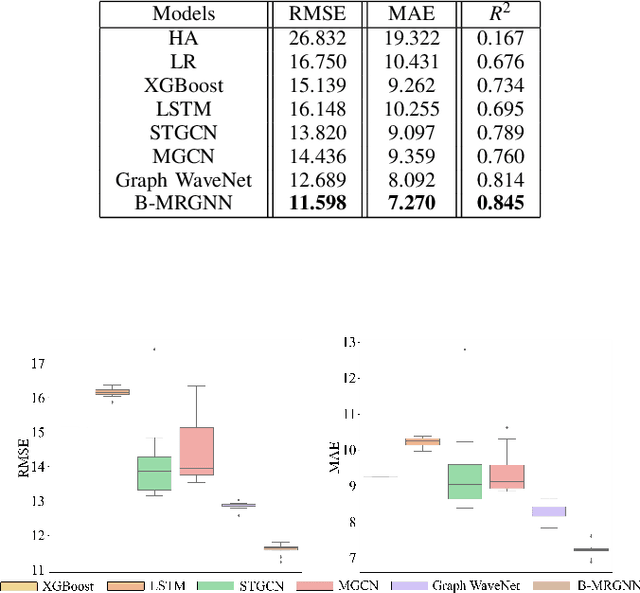
Bike sharing is an increasingly popular part of urban transportation systems. Accurate demand prediction is the key to support timely re-balancing and ensure service efficiency. Most existing models of bike-sharing demand prediction are solely based on its own historical demand variation, essentially regarding bike sharing as a closed system and neglecting the interaction between different transport modes. This is particularly important because bike sharing is often used to complement travel through other modes (e.g., public transit). Despite some recent efforts, there is no existing method capable of leveraging spatiotemporal information from multiple modes with heterogeneous spatial units. To address this research gap, this study proposes a graph-based deep learning approach for bike sharing demand prediction (B-MRGNN) with multimodal historical data as input. The spatial dependencies across modes are encoded with multiple intra- and inter-modal graphs. A multi-relational graph neural network (MRGNN) is introduced to capture correlations between spatial units across modes, such as bike sharing stations, subway stations, or ride-hailing zones. Extensive experiments are conducted using real-world bike sharing, subway and ride-hailing data from New York City, and the results demonstrate the superior performance of our proposed approach compared to existing methods.
Joint Demand Prediction for Multimodal Systems: A Multi-task Multi-relational Spatiotemporal Graph Neural Network Approach
Dec 15, 2021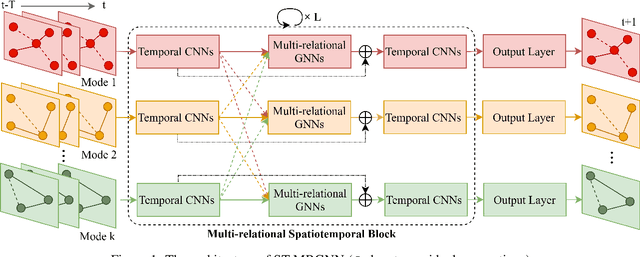

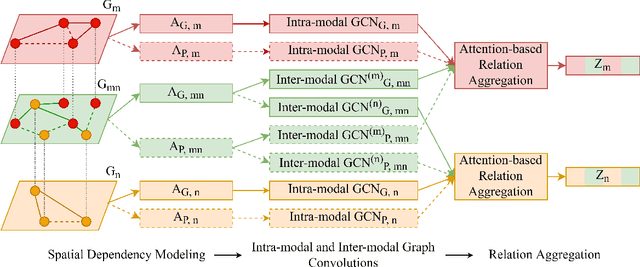

Dynamic demand prediction is crucial for the efficient operation and management of urban transportation systems. Extensive research has been conducted on single-mode demand prediction, ignoring the fact that the demands for different transportation modes can be correlated with each other. Despite some recent efforts, existing approaches to multimodal demand prediction are generally not flexible enough to account for multiplex networks with diverse spatial units and heterogeneous spatiotemporal correlations across different modes. To tackle these issues, this study proposes a multi-relational spatiotemporal graph neural network (ST-MRGNN) for multimodal demand prediction. Specifically, the spatial dependencies across modes are encoded with multiple intra- and inter-modal relation graphs. A multi-relational graph neural network (MRGNN) is introduced to capture cross-mode heterogeneous spatial dependencies, consisting of generalized graph convolution networks to learn the message passing mechanisms within relation graphs and an attention-based aggregation module to summarize different relations. We further integrate MRGNNs with temporal gated convolution layers to jointly model heterogeneous spatiotemporal correlations. Extensive experiments are conducted using real-world subway and ride-hailing datasets from New York City, and the results verify the improved performance of our proposed approach over existing methods across modes. The improvement is particularly large for demand-sparse locations. Further analysis of the attention mechanisms of ST-MRGNN also demonstrates its good interpretability for understanding cross-mode interactions.