 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbing the Critical Point (CritPt) of AI Reasoning: a Frontier Physics Research Benchmark
Oct 01, 2025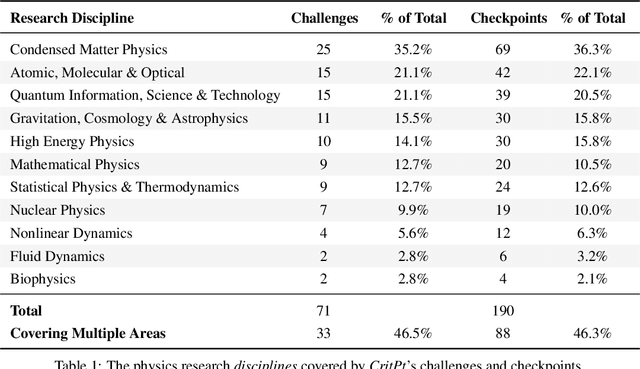
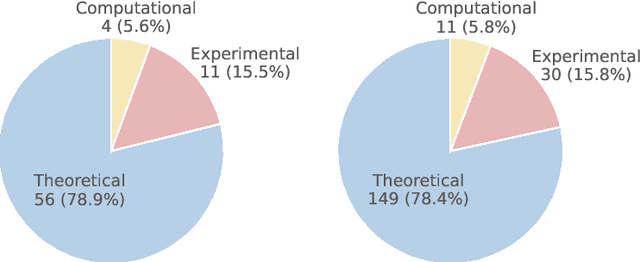
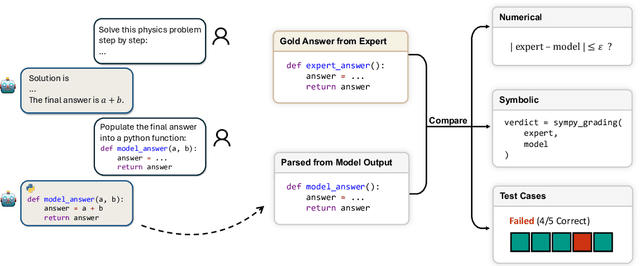
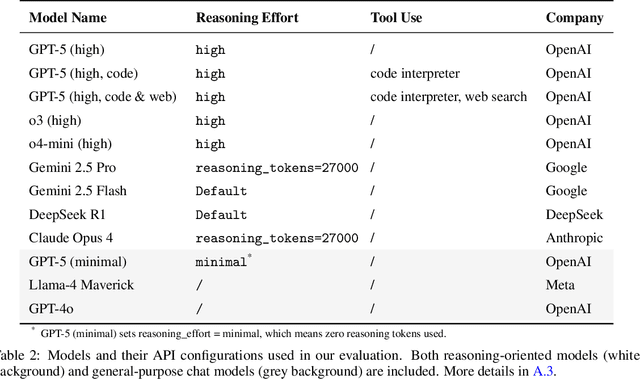
While large language models (LLMs) with reasoning capabilities are progressing rapidly on high-school math competitions and coding, can they reason effectively through complex, open-ended challenges found in frontier physics research? And crucially, what kinds of reasoning tasks do physicists want LLMs to assist with? To address these questions, we present the CritPt (Complex Research using Integrated Thinking - Physics Test, pronounced "critical point"), the first benchmark designed to test LLMs on unpublished, research-level reasoning tasks that broadly covers modern physics research areas, including condensed matter, quantum physics, atomic, molecular & optical physics, astrophysics, high energy physics, mathematical physics, statistical physics, nuclear physics, nonlinear dynamics, fluid dynamics and biophysics. CritPt consists of 71 composite research challenges designed to simulate full-scale research projects at the entry level, which are also decomposed to 190 simpler checkpoint tasks for more fine-grained insights. All problems are newly created by 50+ active physics researchers based on their own research. Every problem is hand-curated to admit a guess-resistant and machine-verifiable answer and is evaluated by an automated grading pipeline heavily customized for advanced physics-specific output formats. We find that while current state-of-the-art LLMs show early promise on isolated checkpoints, they remain far from being able to reliably solve full research-scale challenges: the best average accuracy among base models is only 4.0% , achieved by GPT-5 (high), moderately rising to around 10% when equipped with coding tools. Through the realistic yet standardized evaluation offered by CritPt, we highlight a large disconnect between current model capabilities and realistic physics research demands, offering a foundation to guide the development of scientifically grounded AI tools.
Efficient UAV Swarm-Based Multi-Task Federated Learning with Dynamic Task Knowledge Sharing
Mar 12, 2025UAV swarms are widely used in emergency communications, area monitoring, and disaster relief. Coordinated by control centers, they are ideal for federated learning (FL) frameworks. However, current UAV-assisted FL methods primarily focus on single tasks, overlooking the need for multi-task training. In disaster relief scenarios, UAVs perform tasks such as crowd detection, road feasibility analysis, and disaster assessment, which exhibit time-varying demands and potential correlations. In order to meet the time-varying requirements of tasks and complete multiple tasks efficiently under resource constraints, in this paper, we propose a UAV swarm based multi-task FL framework, where ground emergency vehicles (EVs) collaborate with UAVs to accomplish multiple tasks efficiently under constrained energy and bandwidth resources. Through theoretical analysis, we identify key factors affecting task performance and introduce a task attention mechanism to dynamically evaluate task importance, thereby achieving efficient resource allocation. Additionally, we propose a task affinity (TA) metric to capture the dynamic correlation among tasks, thereby promoting task knowledge sharing to accelerate training and improve the generalization ability of the model in different scenarios. To optimize resource allocation, we formulate a two-layer optimization problem to jointly optimize UAV transmission power, computation frequency, bandwidth allocation, and UAV-EV associations. For the inner problem, we derive closed-form solutions for transmission power, computation frequency, and bandwidth allocation and apply a block coordinate descent method for optimization. For the outer problem, a two-stage algorithm is designed to determine optimal UAV-EV associations. Furthermore, theoretical analysis reveals a trade-off between UAV energy consumption and multi-task performance.
MAB-Based Channel Scheduling for Asynchronous Federated Learning in Non-Stationary Environments
Mar 03, 2025Federated learning enables distributed model training across clients under central coordination without raw data exchange. However, in wireless implementations, frequent parameter updates between the server and clients create significant communication overhead. While existing research assumes known channel state information (CSI) or stationary distributions, practical wireless channels exhibit non-stationary characteristics due to channel fading, user mobility, and hostile attacks. The unavailability of CSI and time-varying statistics can cause unpredictable transmission failures, exacerbating client staleness and affecting model convergence. To address these challenges, we propose an asynchronous federated learning scheduling framework for non-stationary channel environments to reduce staleness while promoting fair and efficient communication and aggregation.We focus on two channel scenarios: extremely non-stationary and piecewise stationary. Age of Information (AoI) quantifies client staleness under non-stationary conditions. Through a rigorous convergence analysis, we explore how AoI and per-round client participation affect learning performance. The scheduling problem is modeled within a multi-armed bandit (MAB) framework, and we derive the theoretical lower bounds on AoI regret. Based on these findings, we develop scheduling strategies for both scenarios using the GLR-CUCB and M-exp3 algorithms, also deriving their respective upper bounds on AoI regret. To address imbalanced client updates, we introduce an adaptive allocation strategy that incorporates marginal utility and fairness. Simulations demonstrate that our algorithm reduces AoI regret growth, accelerates federated learning convergence, and promotes fairer aggregation.
UAV-Assisted Multi-Task Federated Learning with Task Knowledge Sharing
Jan 18, 2025The rapid development of Unmanned aerial vehicles (UAVs) technology has spawned a wide variety of applications, such as emergency communications, regional surveillance, and disaster relief. Due to their limited battery capacity and processing power, multiple UAVs are often required for complex tasks. In such cases, a control center is crucial for coordinating their activities, which fits well with the federated learning (FL) framework. However, conventional FL approaches often focus on a single task, ignoring the potential of training multiple related tasks simultaneously. In this paper, we propose a UAV-assisted multi-task federated learning scheme, in which data collected by multiple UAVs can be used to train multiple related tasks concurrently. The scheme facilitates the training process by sharing feature extractors across related tasks and introduces a task attention mechanism to balance task performance and encourage knowledge sharing. To provide an analytical description of training performance, the convergence analysis of the proposed scheme is performed. Additionally, the optimal bandwidth allocation for UAVs under limited bandwidth conditions is derived to minimize communication time. Meanwhile, a UAV-EV association strategy based on coalition formation game is proposed. Simulation results validate the effectiveness of the proposed scheme in enhancing multi-task performance and training speed.
Ground state phases of the two-dimension electron gas with a unified variational approach
May 29, 2024



The two-dimensional electron gas (2DEG) is a fundamental model, which is drawing increasing interest because of recent advances in experimental and theoretical studies of 2D materials. Current understanding of the ground state of the 2DEG relies on quantum Monte Carlo calculations, based on variational comparisons of different ansatze for different phases. We use a single variational ansatz, a general backflow-type wave function using a message-passing neural quantum state architecture, for a unified description across the entire density range. The variational optimization consistently leads to lower ground-state energies than previous best results. Transition into a Wigner crystal (WC) phase occurs automatically at rs = 37 +/- 1, a density lower than currently believed. Between the liquid and WC phases, the same ansatz and variational search strongly suggest the existence of intermediate states in a broad range of densities, with enhanced short-range nematic spin correlations.