 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Efficient End-to-End 3D Model Reconstruction based on Neural Architecture Search
Mar 01, 2022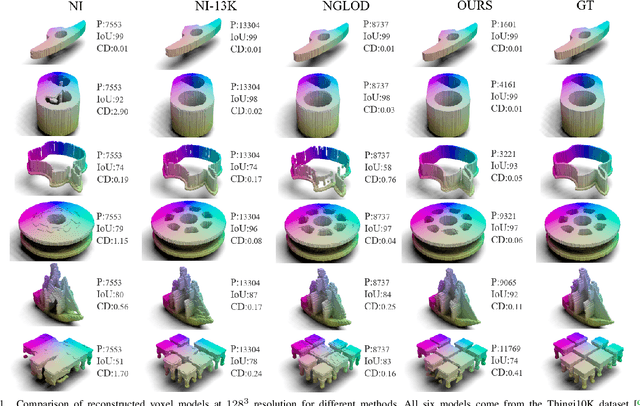
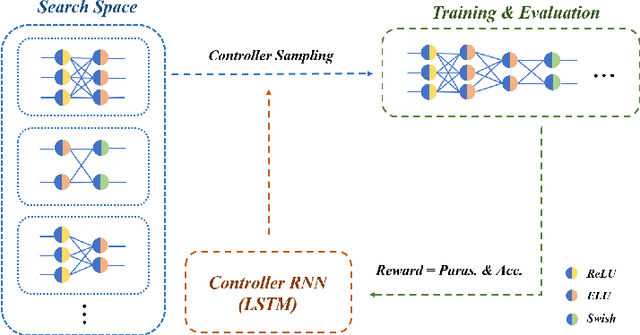
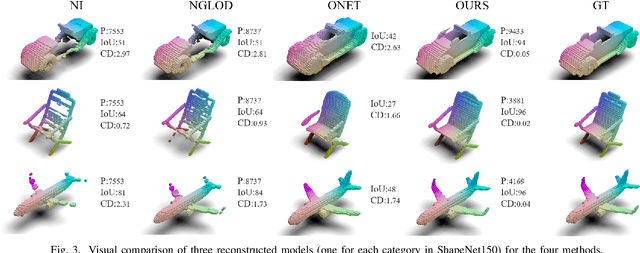
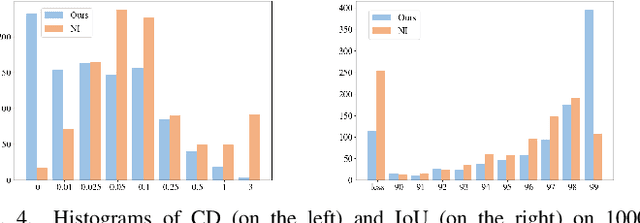
Using neural networks to represent 3D objects has become popular. However, many previous works employ neural networks with fixed architecture and size to represent different 3D objects, which lead to excessive network parameters for simple objects and limited reconstruction accuracy for complex objects. For each 3D model, it is desirable to have an end-to-end neural network with as few parameters as possible to achieve high-fidelity reconstruction. In this paper, we propose an efficient model reconstruction method utilizing neural architecture search (NAS) and binary classification. Taking the number of layers, the number of nodes in each layer, and the activation function of each layer as the search space, a specific network architecture can be obtained based on reinforcement learning technology. Furthermore, to get rid of the traditional surface reconstruction algorithms (e.g., marching cube) used after network inference, we complete the end-to-end network by classifying binary voxels. Compared to other signed distance field (SDF) prediction or binary classification networks, our method achieves significantly higher reconstruction accuracy using fewer network parameters.
High-fidelity 3D Model Compression based on Key Spheres
Jan 20, 2022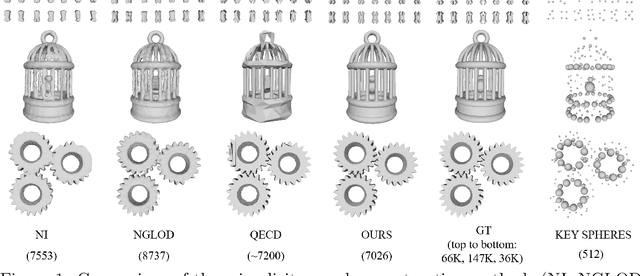
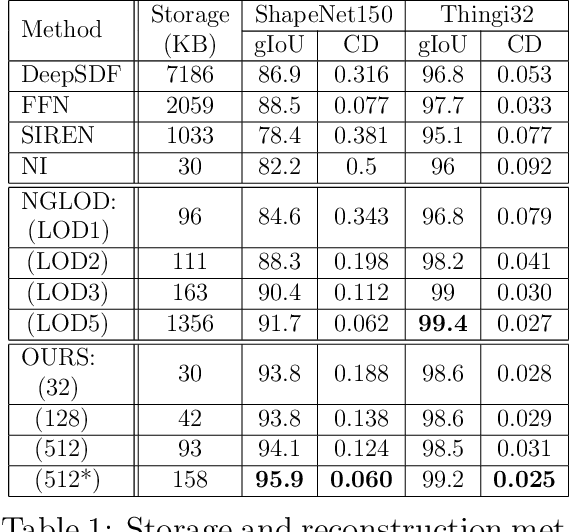
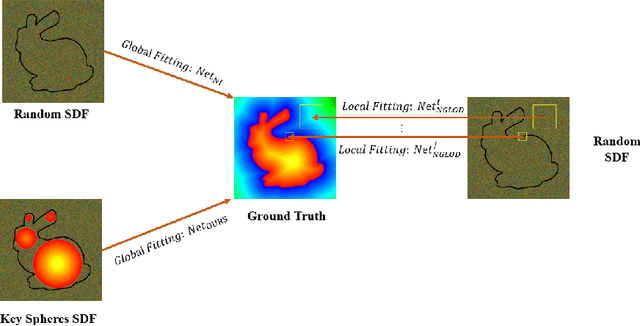
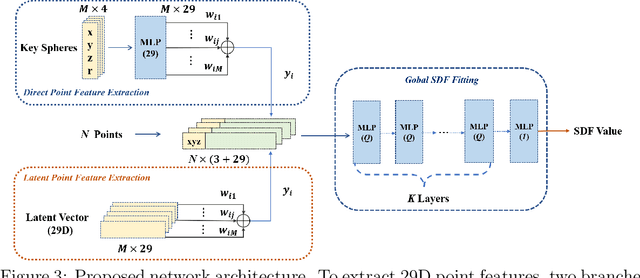
In recent years, neural signed distance function (SDF) has become one of the most effective representation methods for 3D models. By learning continuous SDFs in 3D space, neural networks can predict the distance from a given query space point to its closest object surface,whose positive and negative signs denote inside and outside of the object, respectively. Training a specific network for each 3D model, which individually embeds its shape, can realize compressed representation of objects by storing fewer network (and possibly latent) parameters. Consequently, reconstruction through network inference and surface recovery can be achieved. In this paper, we propose an SDF prediction network using explicit key spheres as input. Key spheres are extracted from the internal space of objects, whose centers either have relatively larger SDF values (sphere radii), or are located at essential positions. By inputting the spatial information of multiple spheres which imply different local shapes, the proposed method can significantly improve the reconstruction accuracy with a negligible storage cost. Compared to previous works, our method achieves the high-fidelity and high-compression 3D object coding and reconstruction. Experiments conducted on three datasets verify the superior performance of our method.
SN-Graph: a Minimalist 3D Object Representation for Classification
May 31, 2021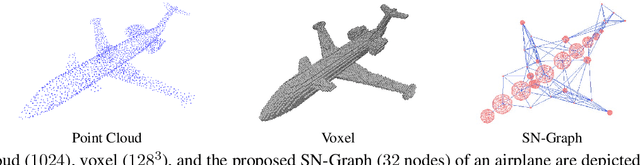
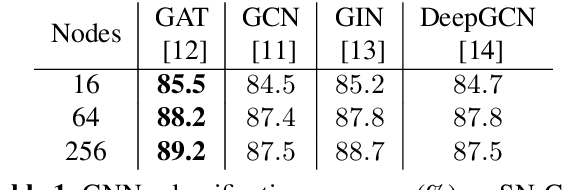
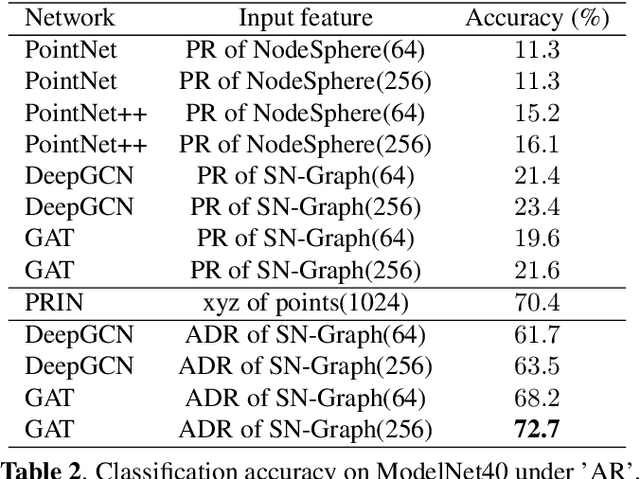
Using deep learning techniques to process 3D objects has achieved many successes. However, few methods focus on the representation of 3D objects, which could be more effective for specific tasks than traditional representations, such as point clouds, voxels, and multi-view images. In this paper, we propose a Sphere Node Graph (SN-Graph) to represent 3D objects. Specifically, we extract a certain number of internal spheres (as nodes) from the signed distance field (SDF), and then establish connections (as edges) among the sphere nodes to construct a graph, which is seamlessly suitable for 3D analysis using graph neural network (GNN). Experiments conducted on the ModelNet40 dataset show that when there are fewer nodes in the graph or the tested objects are rotated arbitrarily, the classification accuracy of SN-Graph is significantly higher than the state-of-the-art methods.