 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCART: Context-Aware Terrain Adaptation using Temporal Sequence Selection for Legged Robots
Apr 15, 2026Animals in nature combine multiple modalities, such as sight and feel, to perceive terrain and develop an understanding of how to walk on uneven terrain in a stable manner. Similarly, legged robots need to develop their ability to stably walk on complex terrains by developing an understanding of the relationship between vision and proprioception. Most current terrain adaptation methods are susceptible to failure on complex, off-road terrain as they rely on prior experience, particularly observations from a vision sensor. This experience-based learning often creates a Visual-Texture Paradox between what has been seen and how it actually feels. In this work, we introduce CART, a high-level controller built on a context-aware terrain adaptation approach that integrates proprioception and exteroception from onboard sensing to achieve a robust understanding of terrain. We evaluate our method on multiple terrains using an ANYmal-C robot on the IsaacSim simulator and a Boston Dynamics SPOT robot for our real-world experiments. To evaluate the learned contextual terrain properties, we adapt vibrational stability on the base of the robot as a metric. We compare CART with various state-of-the-art baselines equipped with multimodal sensing in both simulation and the real world. CART achieves an average success rate improvement of 5% over all baselines in simulation and improves the overall stability up to 45% and 24% in the real world without increasing the time taken by the robot to accomplish locomotion tasks.
A.X K1 Technical Report
Jan 15, 2026We introduce A.X K1, a 519B-parameter Mixture-of-Experts (MoE) language model trained from scratch. Our design leverages scaling laws to optimize training configurations and vocabulary size under fixed computational budgets. A.X K1 is pre-trained on a corpus of approximately 10T tokens, curated by a multi-stage data processing pipeline. Designed to bridge the gap between reasoning capability and inference efficiency, A.X K1 supports explicitly controllable reasoning to facilitate scalable deployment across diverse real-world scenarios. We propose a simple yet effective Think-Fusion training recipe, enabling user-controlled switching between thinking and non-thinking modes within a single unified model. Extensive evaluations demonstrate that A.X K1 achieves performance competitive with leading open-source models, while establishing a distinctive advantage in Korean-language benchmarks.
Active Illumination Control in Low-Light Environments using NightHawk
Jun 05, 2025Subterranean environments such as culverts present significant challenges to robot vision due to dim lighting and lack of distinctive features. Although onboard illumination can help, it introduces issues such as specular reflections, overexposure, and increased power consumption. We propose NightHawk, a framework that combines active illumination with exposure control to optimize image quality in these settings. NightHawk formulates an online Bayesian optimization problem to determine the best light intensity and exposure-time for a given scene. We propose a novel feature detector-based metric to quantify image utility and use it as the cost function for the optimizer. We built NightHawk as an event-triggered recursive optimization pipeline and deployed it on a legged robot navigating a culvert beneath the Erie Canal. Results from field experiments demonstrate improvements in feature detection and matching by 47-197% enabling more reliable visual estimation in challenging lighting conditions.
Depolarized Holography with Polarization-multiplexing Metasurface
Sep 26, 2023The evolution of computer-generated holography (CGH) algorithms has prompted significant improvements in the performances of holographic displays. Nonetheless, they start to encounter a limited degree of freedom in CGH optimization and physical constraints stemming from the coherent nature of holograms. To surpass the physical limitations, we consider polarization as a new degree of freedom by utilizing a novel optical platform called metasurface. Polarization-multiplexing metasurfaces enable incoherent-like behavior in holographic displays due to the mutual incoherence of orthogonal polarization states. We leverage this unique characteristic of a metasurface by integrating it into a holographic display and exploiting polarization diversity to bring an additional degree of freedom for CGH algorithms. To minimize the speckle noise while maximizing the image quality, we devise a fully differentiable optimization pipeline by taking into account the metasurface proxy model, thereby jointly optimizing spatial light modulator phase patterns and geometric parameters of metasurface nanostructures. We evaluate the metasurface-enabled depolarized holography through simulations and experiments, demonstrating its ability to reduce speckle noise and enhance image quality.
Energy-Time Optimal Control of Wheeled Mobile Robots
Jun 06, 2022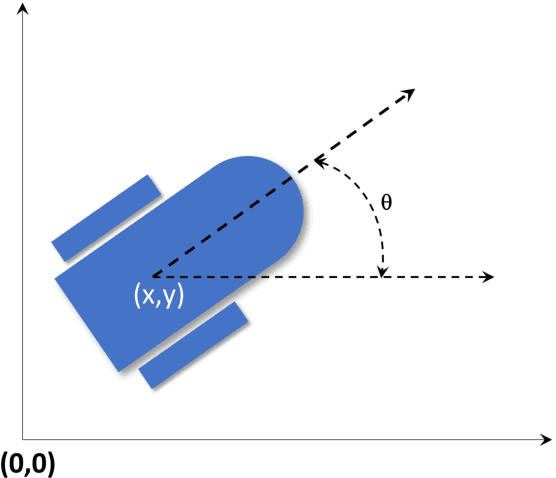
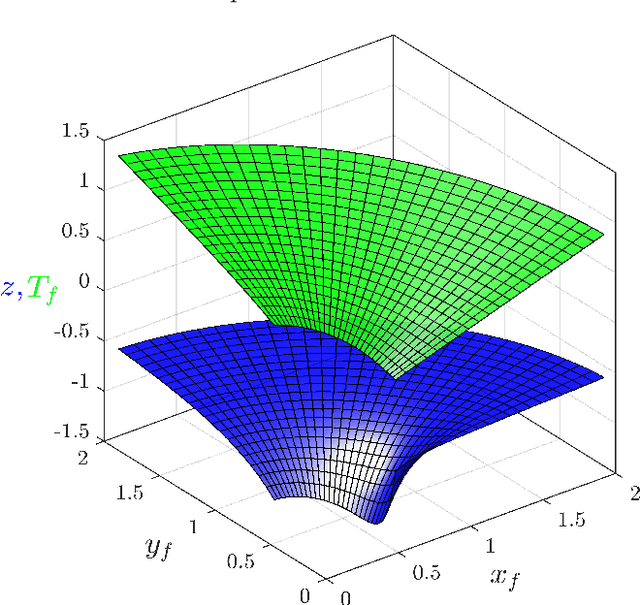
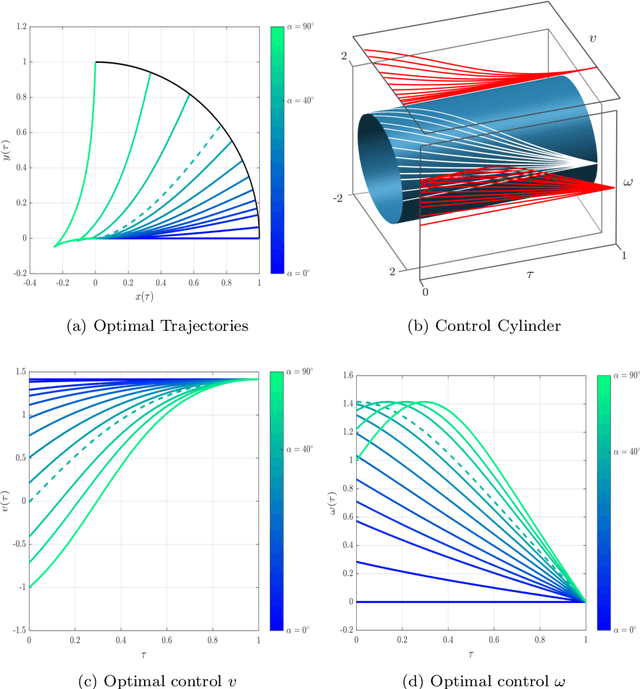
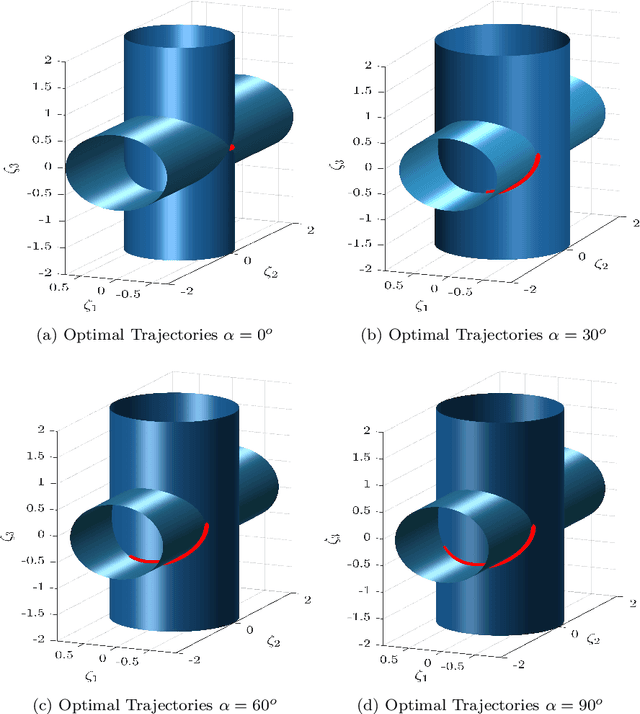
This paper focuses on the energy-time optimal control of wheeled mobile robots undergoing point-to-point transitions in an obstacles free space. Two interchangeable models are used to arrive at the necessary conditions for optimality. The first formulation exploits the Hamiltonian, while the second formulation considers the first variation of the augmented cost to derive the necessary conditions for optimality. Jacobi elliptic functions are shown to parameterize the closed form solutions for the states, control and costates. Analysis of the optimal control reveal that they are constrained to lie on a cylinder whose circular cross-section is a function of the weight penalizing the relative costs of time and energy. The evolving optimal costates for the second formulation are shown to lie on the intersection of two cylinders. The optimal control for the wheeled mobile robot undergoing point-to-point motion is also developed where the linear velocity is constrained to be time-invariant. It is shown that the costates are constrained to lie on the intersection of a cylinder and an extruded parabola. Numerical results for various point-to-point maneuvers are presented to illustrate the change in the structure of the optimal trajectories as a function of the relative location of the terminal and initial states.
* 36 pages,6 figures, 3 appendices
A supervised-learning-based strategy for optimal demand response of an HVAC System
Apr 29, 2019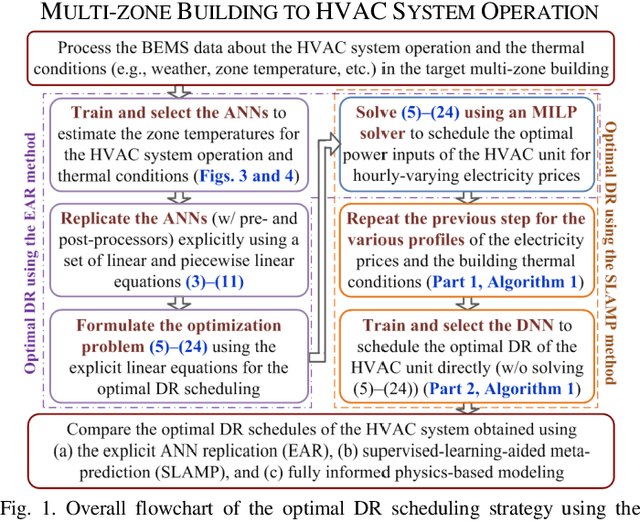
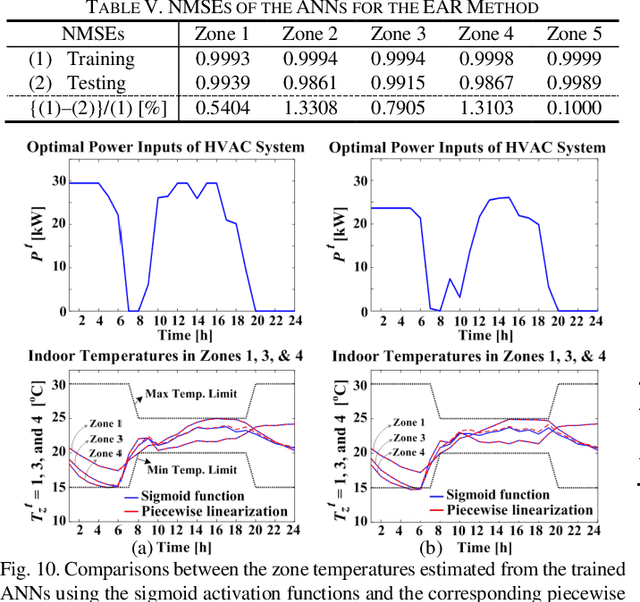
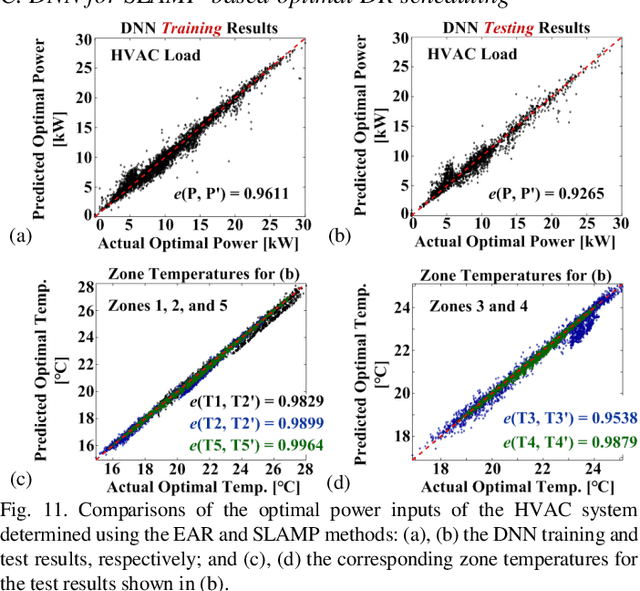
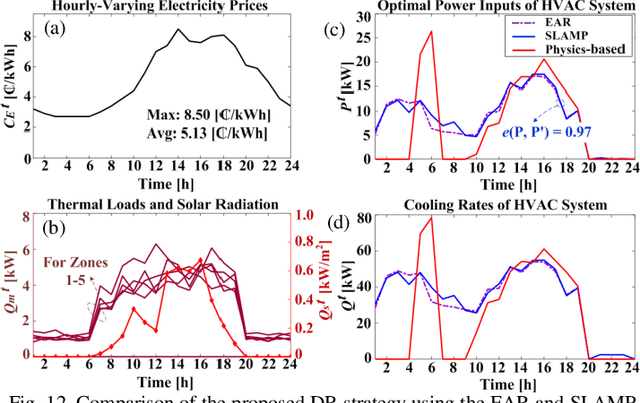
The large thermal capacity of buildings enables heating, ventilating, and air-conditioning (HVAC) systems to be exploited as demand response (DR) resources. Optimal DR of HVAC units is challenging, particularly for multi-zone buildings, because this requires detailed physics-based models of zonal temperature variations for HVAC system operation and building thermal conditions. This paper proposes a new strategy for optimal DR of an HVAC system in a multi-zone building, based on supervised learning (SL). Artificial neural networks (ANNs) are trained with data obtained under normal building operating conditions. The ANNs are replicated using piecewise linear equations, which are explicitly integrated into an optimal scheduling problem for price-based DR. The optimization problem is solved for various electricity prices and building thermal conditions. The solutions are further used to train a deep neural network (DNN) to directly determine the optimal DR schedule, referred to here as supervised-learning-aided meta-prediction (SLAMP). Case studies are performed using three different methods: explicit ANN replication (EAR), SLAMP, and physics-based modeling. The case study results verify the effectiveness of the proposed SL-based strategy, in terms of both practical applicability and computational time, while also ensuring the thermal comfort of occupants and cost-effective operation of the HVAC system.
Memorization Precedes Generation: Learning Unsupervised GANs with Memory Networks
Mar 10, 2018
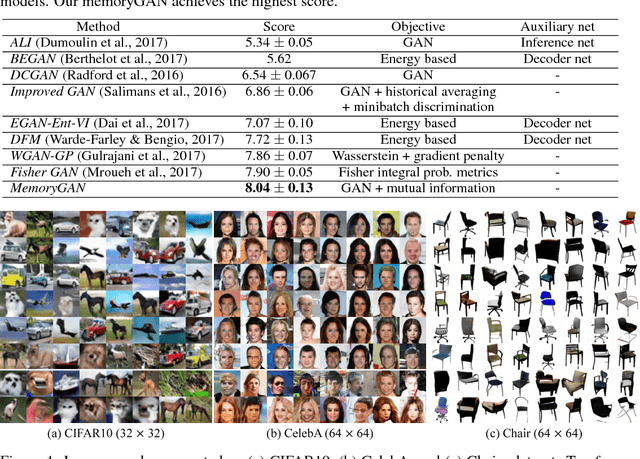

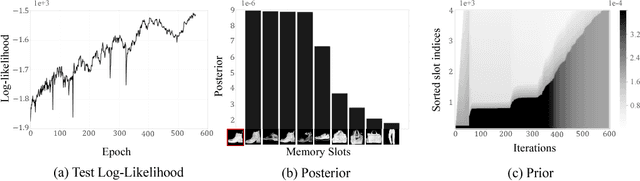
We propose an approach to address two issues that commonly occur during training of unsupervised GANs. First, since GANs use only a continuous latent distribution to embed multiple classes or clusters of data, they often do not correctly handle the structural discontinuity between disparate classes in a latent space. Second, discriminators of GANs easily forget about past generated samples by generators, incurring instability during adversarial training. We argue that these two infamous problems of unsupervised GAN training can be largely alleviated by a learnable memory network to which both generators and discriminators can access. Generators can effectively learn representation of training samples to understand underlying cluster distributions of data, which ease the structure discontinuity problem. At the same time, discriminators can better memorize clusters of previously generated samples, which mitigate the forgetting problem. We propose a novel end-to-end GAN model named memoryGAN, which involves a memory network that is unsupervisedly trainable and integrable to many existing GAN models. With evaluations on multiple datasets such as Fashion-MNIST, CelebA, CIFAR10, and Chairs, we show that our model is probabilistically interpretable, and generates realistic image samples of high visual fidelity. The memoryGAN also achieves the state-of-the-art inception scores over unsupervised GAN models on the CIFAR10 dataset, without any optimization tricks and weaker divergences.