 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCART: Context-Aware Terrain Adaptation using Temporal Sequence Selection for Legged Robots
Apr 15, 2026Animals in nature combine multiple modalities, such as sight and feel, to perceive terrain and develop an understanding of how to walk on uneven terrain in a stable manner. Similarly, legged robots need to develop their ability to stably walk on complex terrains by developing an understanding of the relationship between vision and proprioception. Most current terrain adaptation methods are susceptible to failure on complex, off-road terrain as they rely on prior experience, particularly observations from a vision sensor. This experience-based learning often creates a Visual-Texture Paradox between what has been seen and how it actually feels. In this work, we introduce CART, a high-level controller built on a context-aware terrain adaptation approach that integrates proprioception and exteroception from onboard sensing to achieve a robust understanding of terrain. We evaluate our method on multiple terrains using an ANYmal-C robot on the IsaacSim simulator and a Boston Dynamics SPOT robot for our real-world experiments. To evaluate the learned contextual terrain properties, we adapt vibrational stability on the base of the robot as a metric. We compare CART with various state-of-the-art baselines equipped with multimodal sensing in both simulation and the real world. CART achieves an average success rate improvement of 5% over all baselines in simulation and improves the overall stability up to 45% and 24% in the real world without increasing the time taken by the robot to accomplish locomotion tasks.
Adaptive Illumination Control for Robot Perception
Feb 13, 2026Robot perception under low light or high dynamic range is usually improved downstream - via more robust feature extraction, image enhancement, or closed-loop exposure control. However, all of these approaches are limited by the image captured these conditions. An alternate approach is to utilize a programmable onboard light that adds to ambient illumination and improves captured images. However, it is not straightforward to predict its impact on image formation. Illumination interacts nonlinearly with depth, surface reflectance, and scene geometry. It can both reveal structure and induce failure modes such as specular highlights and saturation. We introduce Lightning, a closed-loop illumination-control framework for visual SLAM that combines relighting, offline optimization, and imitation learning. This is performed in three stages. First, we train a Co-Located Illumination Decomposition (CLID) relighting model that decomposes a robot observation into an ambient component and a light-contribution field. CLID enables physically consistent synthesis of the same scene under alternative light intensities and thereby creates dense multi-intensity training data without requiring us to repeatedly re-run trajectories. Second, using these synthesized candidates, we formulate an offline Optimal Intensity Schedule (OIS) problem that selects illumination levels over a sequence trading off SLAM-relevant image utility against power consumption and temporal smoothness. Third, we distill this ideal solution into a real-time controller through behavior cloning, producing an Illumination Control Policy (ILC) that generalizes beyond the initial training distribution and runs online on a mobile robot to command discrete light-intensity levels. Across our evaluation, Lightning substantially improves SLAM trajectory robustness while reducing unnecessary illumination power.
Active Illumination Control in Low-Light Environments using NightHawk
Jun 05, 2025Subterranean environments such as culverts present significant challenges to robot vision due to dim lighting and lack of distinctive features. Although onboard illumination can help, it introduces issues such as specular reflections, overexposure, and increased power consumption. We propose NightHawk, a framework that combines active illumination with exposure control to optimize image quality in these settings. NightHawk formulates an online Bayesian optimization problem to determine the best light intensity and exposure-time for a given scene. We propose a novel feature detector-based metric to quantify image utility and use it as the cost function for the optimizer. We built NightHawk as an event-triggered recursive optimization pipeline and deployed it on a legged robot navigating a culvert beneath the Erie Canal. Results from field experiments demonstrate improvements in feature detection and matching by 47-197% enabling more reliable visual estimation in challenging lighting conditions.
PANOS: Payload-Aware Navigation in Offroad Scenarios
Sep 25, 2024



Nature has evolved humans to walk on different terrains by developing a detailed understanding of their physical characteristics. Similarly, legged robots need to develop their capability to walk on complex terrains with a variety of task-dependent payloads to achieve their goals. However, conventional terrain adaptation methods are susceptible to failure with varying payloads. In this work, we introduce PANOS, a weakly supervised approach that integrates proprioception and exteroception from onboard sensing to achieve a stable gait while walking by a legged robot over various terrains. Our work also provides evidence of its adaptability over varying payloads. We evaluate our method on multiple terrains and payloads using a legged robot. PANOS improves the stability up to 44% without any payload and 53% with 15 lbs payload. We also notice a reduction in the vibration cost of 20% with the payload for various terrain types when compared to state-of-the-art methods.
PQM: A Point Quality Evaluation Metric for Dense Maps
Jun 06, 2023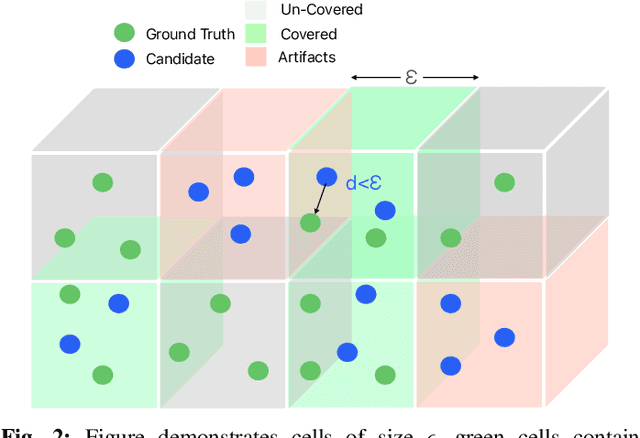
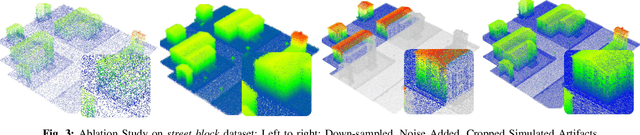
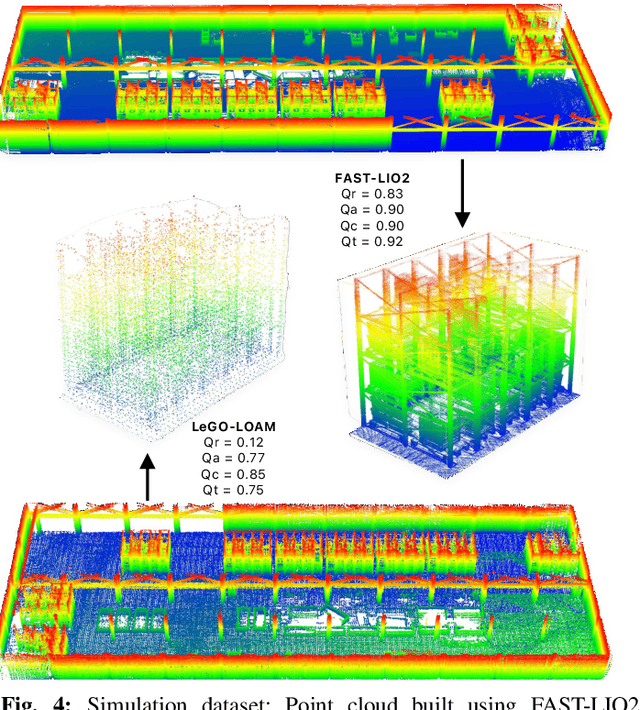
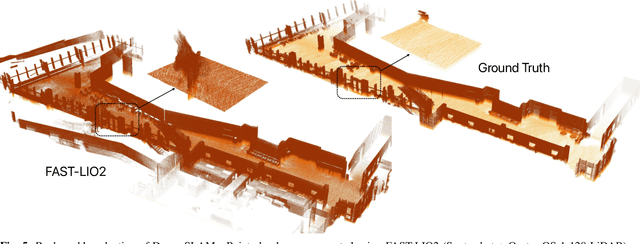
LiDAR-based mapping/reconstruction are important for various applications, but evaluating the quality of the dense maps they produce is challenging. The current methods have limitations, including the inability to capture completeness, structural information, and local variations in error. In this paper, we propose a novel point quality evaluation metric (PQM) that consists of four sub-metrics to provide a more comprehensive evaluation of point cloud quality. The completeness sub-metric evaluates the proportion of missing data, the artifact score sub-metric recognizes and characterizes artifacts, the accuracy sub-metric measures registration accuracy, and the resolution sub-metric quantifies point cloud density. Through an ablation study using a prototype dataset, we demonstrate the effectiveness of each of the sub-metrics and compare them to popular point cloud distance measures. Using three LiDAR SLAM systems to generate maps, we evaluate their output map quality and demonstrate the metrics robustness to noise and artifacts. Our implementation of PQM, datasets and detailed documentation on how to integrate with your custom dense mapping pipeline can be found at github.com/droneslab/pqm