 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCLEAR: A Semantic-Geometric Terrain Abstraction for Large-Scale Unstructured Environments
Jan 19, 2026Long-horizon navigation in unstructured environments demands terrain abstractions that scale to tens of km$^2$ while preserving semantic and geometric structure, a combination existing methods fail to achieve. Grids scale poorly; quadtrees misalign with terrain boundaries; neither encodes landcover semantics essential for traversability-aware planning. This yields infeasible or unreliable paths for autonomous ground vehicles operating over 10+ km$^2$ under real-time constraints. CLEAR (Connected Landcover Elevation Abstract Representation) couples boundary-aware spatial decomposition with recursive plane fitting to produce convex, semantically aligned regions encoded as a terrain-aware graph. Evaluated on maps spanning 9-100~km$^2$ using a physics-based simulator, CLEAR achieves up to 10x faster planning than raw grids with only 6.7% cost overhead and delivers 6-9% shorter, more reliable paths than other abstraction baselines. These results highlight CLEAR's scalability and utility for long-range navigation in applications such as disaster response, defense, and planetary exploration.
PQM: A Point Quality Evaluation Metric for Dense Maps
Jun 06, 2023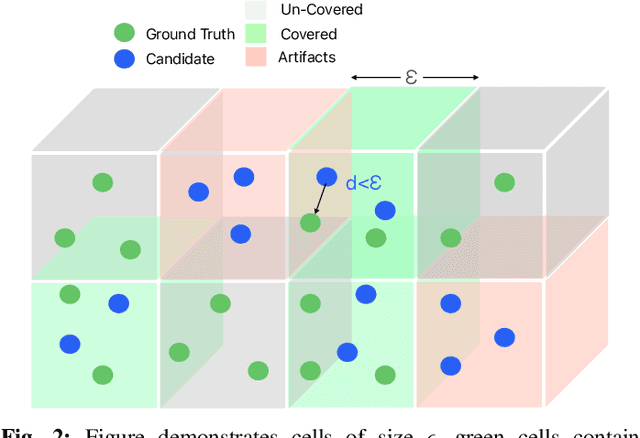
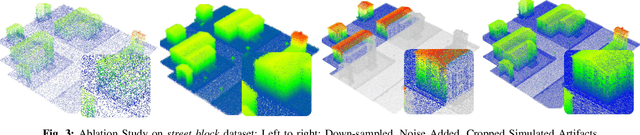
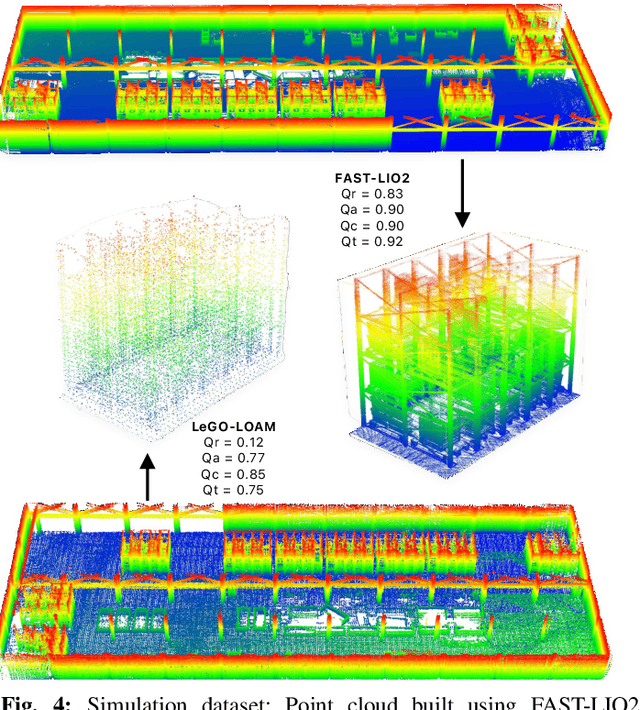
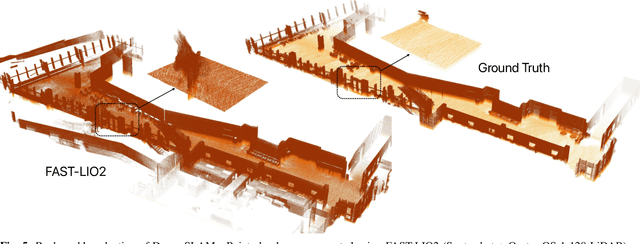
LiDAR-based mapping/reconstruction are important for various applications, but evaluating the quality of the dense maps they produce is challenging. The current methods have limitations, including the inability to capture completeness, structural information, and local variations in error. In this paper, we propose a novel point quality evaluation metric (PQM) that consists of four sub-metrics to provide a more comprehensive evaluation of point cloud quality. The completeness sub-metric evaluates the proportion of missing data, the artifact score sub-metric recognizes and characterizes artifacts, the accuracy sub-metric measures registration accuracy, and the resolution sub-metric quantifies point cloud density. Through an ablation study using a prototype dataset, we demonstrate the effectiveness of each of the sub-metrics and compare them to popular point cloud distance measures. Using three LiDAR SLAM systems to generate maps, we evaluate their output map quality and demonstrate the metrics robustness to noise and artifacts. Our implementation of PQM, datasets and detailed documentation on how to integrate with your custom dense mapping pipeline can be found at github.com/droneslab/pqm