 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrated Grasping Controller Leveraging Optical Proximity Sensors for Simultaneous Contact, Impact Reduction, and Force Control
Jul 08, 2024



Grasping an unknown object is difficult for robot hands. When the characteristics of the object are unknown, knowing how to plan the speed at and width to which the fingers are narrowed is difficult. In this paper, we propose a method to realize the three functions of simultaneous finger contact, impact reduction, and contact force control, which enable effective grasping of an unknown object. We accomplish this by using a control framework called multiple impedance control, which was proposed in a previous study. The advantage of this control is that multiple functions can be realized without switching control laws. The previous study achieved two functions, impact reduction and contact force control, with a two layers of impedance control which was applied independently to individual fingers. In this paper, a new idea of virtual dynamics that treats multiple fingers comprehensively is introduced, which enables the function of simultaneous contact without compromising the other two functions. This research provides a method to achieve delicate grasping by using proximity sensors. For the effectiveness of the proposed method, please refer to https://youtu.be/q0OrJBal4yA.
Reflectance Estimation for Proximity Sensing by Vision-Language Models: Utilizing Distributional Semantics for Low-Level Cognition in Robotics
Apr 12, 2024



Large language models (LLMs) and vision-language models (VLMs) have been increasingly used in robotics for high-level cognition, but their use for low-level cognition, such as interpreting sensor information, remains underexplored. In robotic grasping, estimating the reflectance of objects is crucial for successful grasping, as it significantly impacts the distance measured by proximity sensors. We investigate whether LLMs can estimate reflectance from object names alone, leveraging the embedded human knowledge in distributional semantics, and if the latent structure of language in VLMs positively affects image-based reflectance estimation. In this paper, we verify that 1) LLMs such as GPT-3.5 and GPT-4 can estimate an object's reflectance using only text as input; and 2) VLMs such as CLIP can increase their generalization capabilities in reflectance estimation from images. Our experiments show that GPT-4 can estimate an object's reflectance using only text input with a mean error of 14.7%, lower than the image-only ResNet. Moreover, CLIP achieved the lowest mean error of 11.8%, while GPT-3.5 obtained a competitive 19.9% compared to ResNet's 17.8%. These results suggest that the distributional semantics in LLMs and VLMs increases their generalization capabilities, and the knowledge acquired by VLMs benefits from the latent structure of language.
Single-Motor Robotic Gripper with Multi-Surface Fingers for Variable Grasping Configurations
Mar 24, 2024
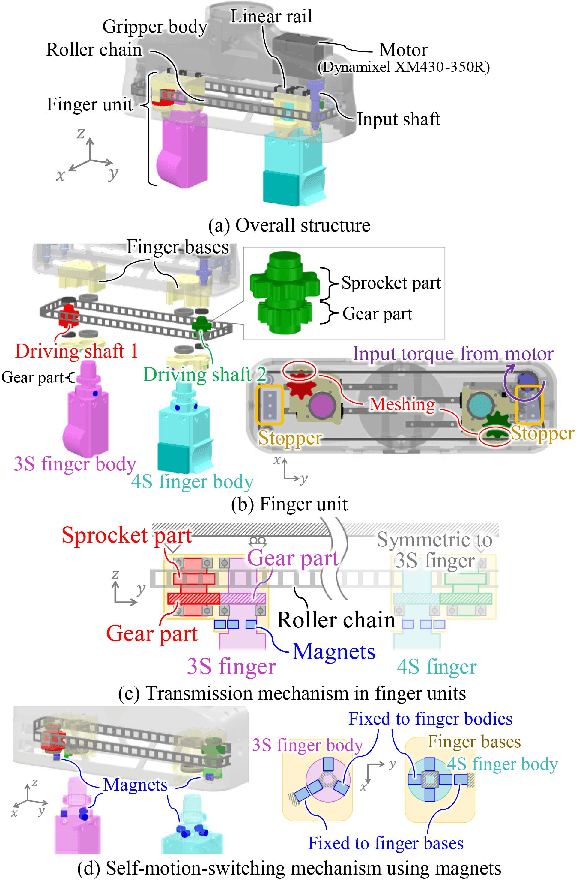


This study proposes a novel robotic gripper with variable grasping configurations for grasping various objects. The fingers of the developed gripper incorporate multiple different surfaces. The gripper possesses the function of altering the finger surfaces facing a target object by rotating the fingers in its longitudinal direction. In the proposed design equipped with two fingers, the two fingers incorporate three and four surfaces, respectively, resulting in the nine available grasping configurations by the combination of these finger surfaces. The developed gripper is equipped with the functions of opening/closing its fingers for grasping and rotating its fingers to alter the grasping configuration -all achieved with a single motor. To enable the two motions using a single motor, this study introduces a self-motion switching mechanism utilizing magnets. This mechanism automatically transitions between gripper motions based on the direction of the motor rotation when the gripper is fully opened. In this state, rotating the motor towards closing initiates the finger closing action, while further opening the fingers from the fully opened state activates the finger rotation. This letter presents the gripper design, the mechanics of the self-motion switching mechanism, the control method, and the grasping configuration selection strategy. The performance of the gripper is experimentally demonstrated.
Lightweight High-Speed and High-Force Gripper for Assembly
Oct 26, 2023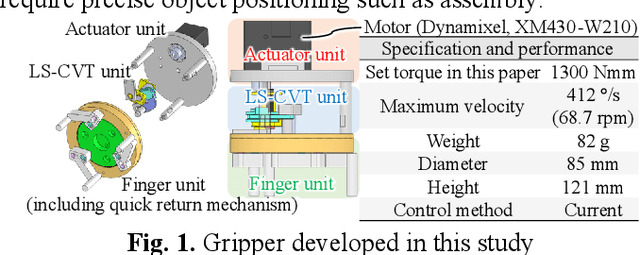
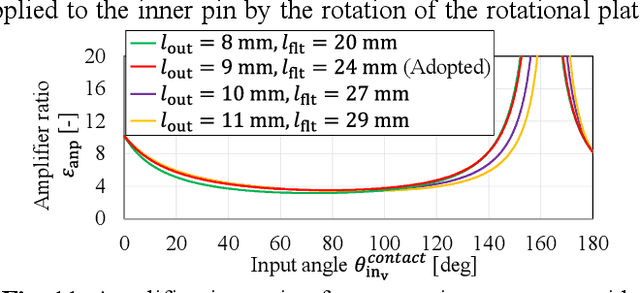
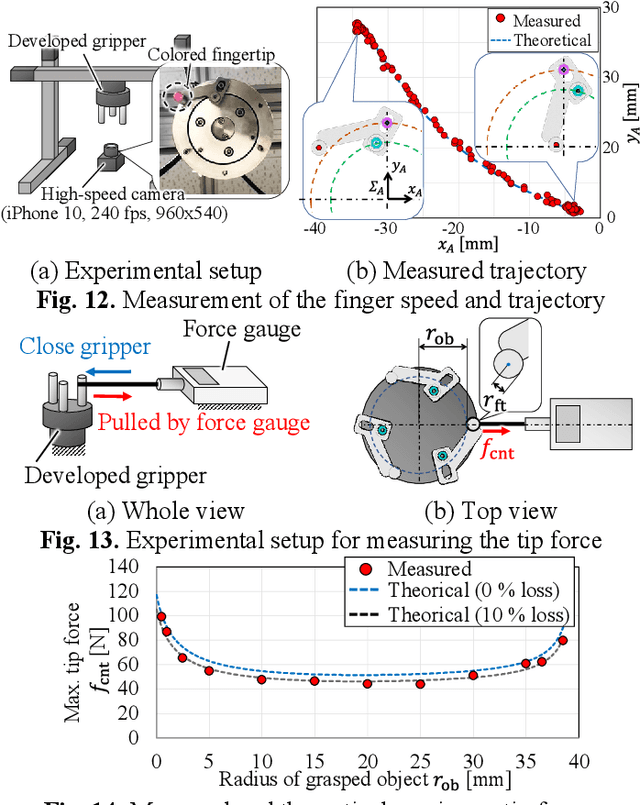
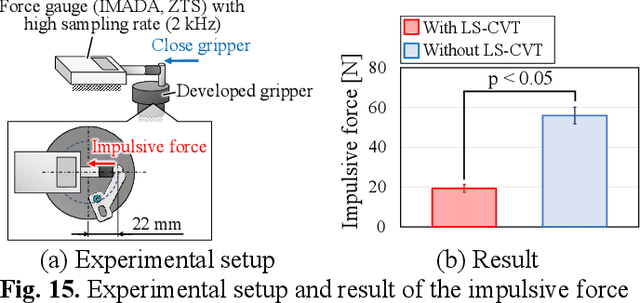
This paper presents a novel industrial robotic gripper with a high grasping speed (maximum: 1396 mm/s), high tip force (maximum: 80 N) for grasping, large motion range, and lightweight design (0.3 kg). To realize these features, the high-speed section of the quick-return mechanism and load-sensitive continuously variable transmission mechanism are installed in the gripper. The gripper is also equipped with a self-centering function. The high grasping speed and self-centering function improve the cycle time in robotic operations. In addition, the high tip force is advantageous for stably grasping and assembling heavy objects. Moreover, the design of the gripper reduce the gripper's proportion of the manipulator's payload, thus increasing the weight of the object that can be grasped. The gripper performance was validated through kinematic and static analyses as well as experimental evaluations. This paper also presents the analysis of the self-centering function of the developed gripper.
1-degree-of-freedom Robotic Gripper With Infinite Self-Twist Function
Nov 10, 2022This study proposed a novel robotic gripper that can achieve grasping and infinite wrist twisting motions using a single actuator. The gripper is equipped with a differential gear mechanism that allows switching between the grasping and twisting motions according to the magnitude of the tip force applied to the finger. The grasping motion is activated when the tip force is below a set value, and the wrist twisting motion is activated when the tip force exceeds this value. "Twist grasping," a special grasping mode that allows the wrapping of a flexible thin object around the fingers of the gripper, can be achieved by the twisting motion. Twist grasping is effective for handling objects with flexible thin parts, such as laminated packaging pouches, that are difficult to grasp using conventional antipodal grasping. In this study, the gripper design is presented, and twist grasping is analyzed. The gripper performance is experimentally validated.
Sensing and Control of Friction Mode for Contact Area Variable Surfaces
Nov 09, 2022Robotic hands with soft surfaces can perform stable grasping, but the high friction of the soft surfaces makes it difficult to release objects, or to perform operations that require sliding. To solve this issue, we previously developed a contact area variable surface (CAVS), whose friction changed according to the load. However, only our fundamental results were previously presented, with detailed analyses not provided. In this study, we first investigated the CAVS friction anisotropy, and demonstrated that the longitudinal direction exhibited a larger ratio of friction change. Next, we proposed a sensible CAVS, capable of providing a variable-friction mechanism, and tested its sensing and control systems in operations requiring switching between sliding and stable-grasping modes. Friction sensing was performed using an embedded camera, and we developed a gripper using the sensible CAVS, considering the CAVS friction anisotropy. In CAVS, the low-friction mode corresponds to a small grasping force, while the high-friction mode corresponds to a greater grasping force. Therefore, by controlling only the friction mode, the gripper mode can be set to either the sliding or stable-grasping mode. Based on this feature, a methodology for controlling the contact mode was constructed. We demonstrated a manipulation involving sliding and stable grasping, and thus verified the efficacy of the developed sensible CAVS.
Soft robotic hand with finger-bending/friction-reduction switching mechanism through 1-degree-of-freedom flow control
Mar 28, 2022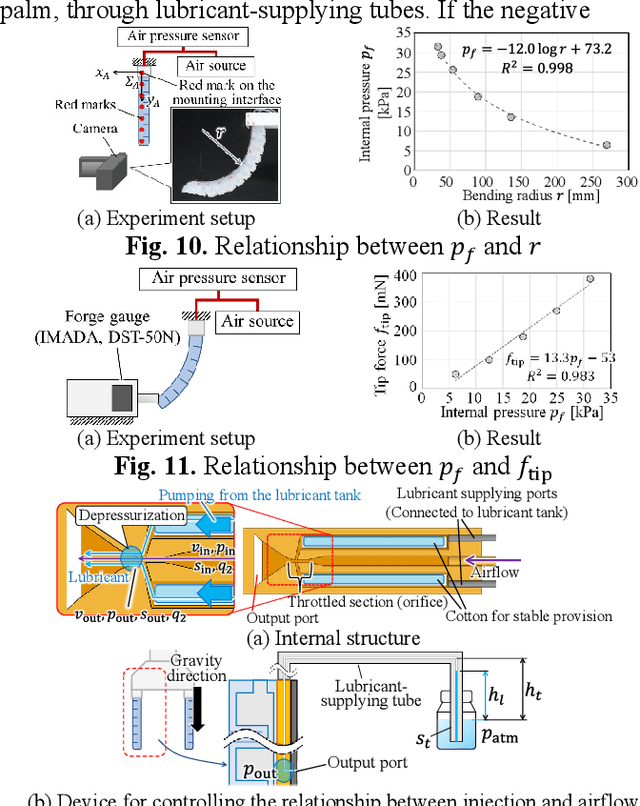
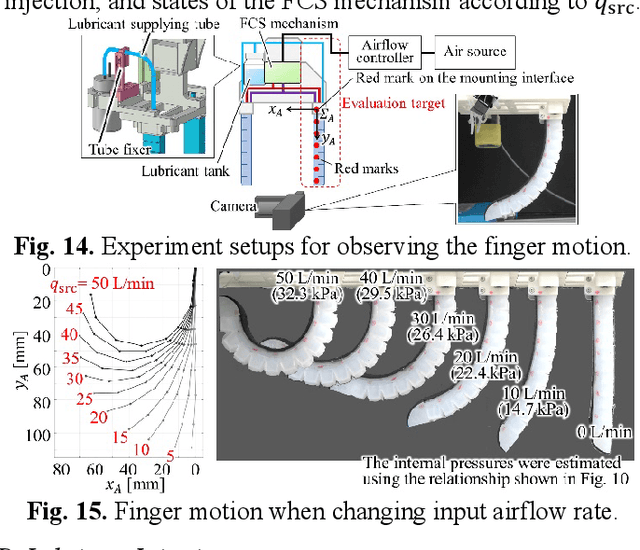
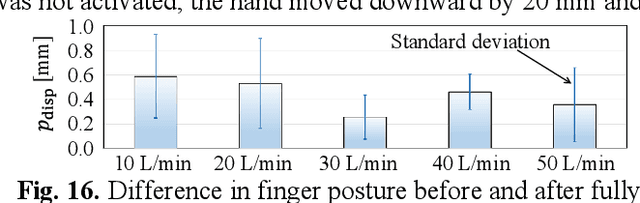
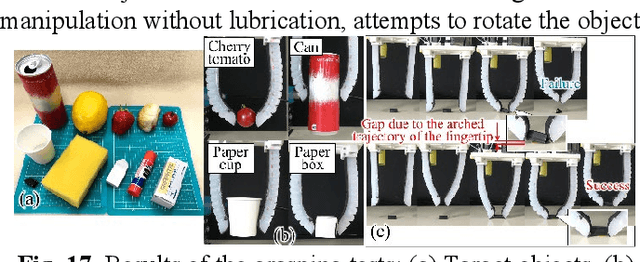
This paper proposes a novel pneumatic soft robotic hand that incorporates a mechanism that can switch the airflow path using a single airflow control. The developed hand can control the finger motion and operate the surface friction variable mechanism. In the friction variable mechanism, a lubricant is injected onto the high-friction finger surface to reduce surface friction. To inject the lubrication using a positive-pressure airflow, the Venturi effect is applied. The design and evaluation of the airflow-path switching and friction variable mechanisms are described. Moreover, the entire design of a soft robotic hand equipped with these mechanisms is presented. The performance was validated through grasping, placing, and manipulation tests.