 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLightweight High-Speed and High-Force Gripper for Assembly
Oct 26, 2023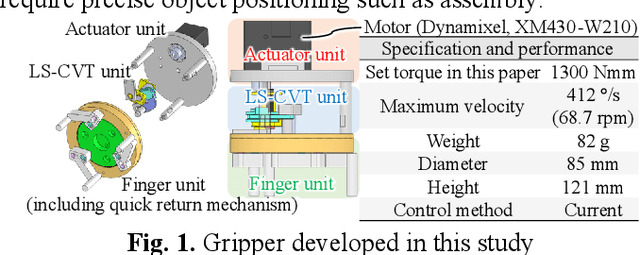
This paper presents a novel industrial robotic gripper with a high grasping speed (maximum: 1396 mm/s), high tip force (maximum: 80 N) for grasping, large motion range, and lightweight design (0.3 kg). To realize these features, the high-speed section of the quick-return mechanism and load-sensitive continuously variable transmission mechanism are installed in the gripper. The gripper is also equipped with a self-centering function. The high grasping speed and self-centering function improve the cycle time in robotic operations. In addition, the high tip force is advantageous for stably grasping and assembling heavy objects. Moreover, the design of the gripper reduce the gripper's proportion of the manipulator's payload, thus increasing the weight of the object that can be grasped. The gripper performance was validated through kinematic and static analyses as well as experimental evaluations. This paper also presents the analysis of the self-centering function of the developed gripper.