 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlexible and slim device switching air blowing and suction by a single airflow control
Mar 08, 2023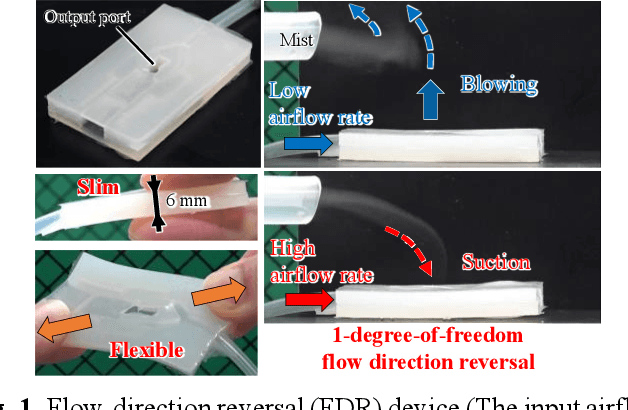
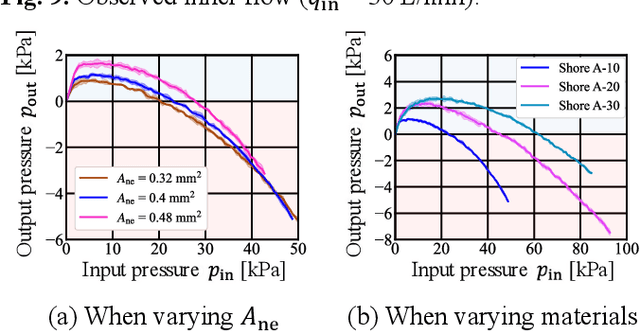
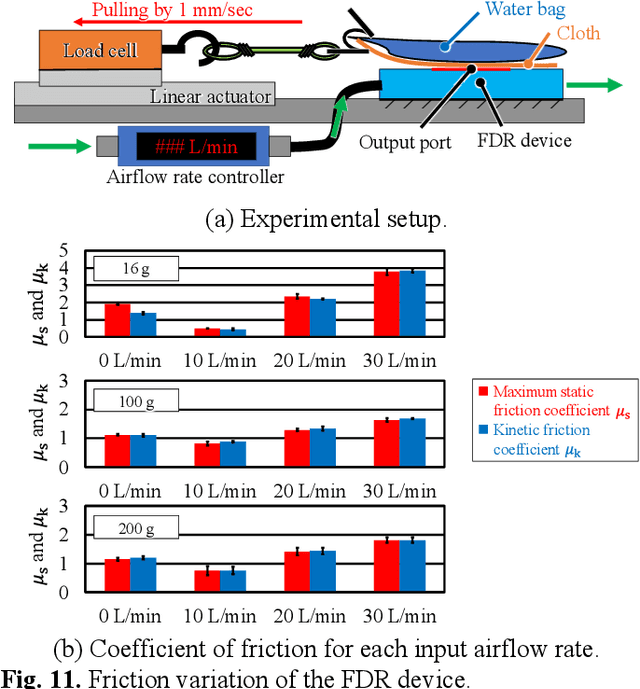
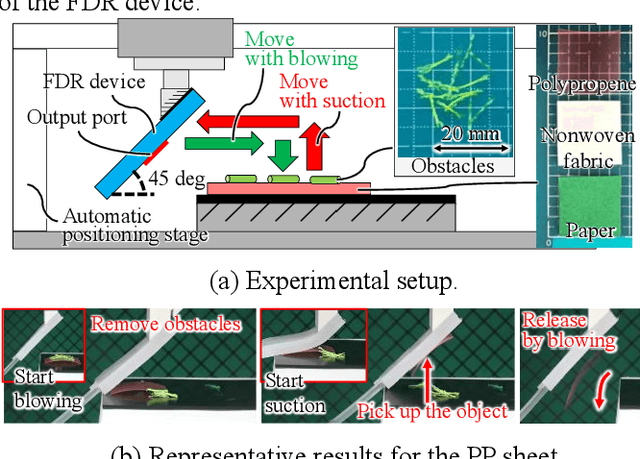
This study proposes a soft robotic device with a slim and flexible body that switches between air blowing and suction with a single airflow control. Suction is achieved by jet flow entraining surrounding air, and blowing is achieved by blocking and reversing jet flow. The thin and flexible flap gate enables the switching. Air flow is blocked while the gate is closed and passes through while the gate is open. The opening and closing of the flap gate are controlled by the expansion of the inflatable chambers installed near the gate. The extent of expansion is determined by the upstream static pressure. Therefore, the gate can be controlled by the input airflow rate. The dimensions of the flap gate are introduced as a design parameter, and we show that the parameter contributes to the blowing and suction capacities. We also experimentally demonstrate that the proposed device is available for a variable friction system and an end effector for picking up a thin object covered with dust.
Sensing and Control of Friction Mode for Contact Area Variable Surfaces
Nov 09, 2022Robotic hands with soft surfaces can perform stable grasping, but the high friction of the soft surfaces makes it difficult to release objects, or to perform operations that require sliding. To solve this issue, we previously developed a contact area variable surface (CAVS), whose friction changed according to the load. However, only our fundamental results were previously presented, with detailed analyses not provided. In this study, we first investigated the CAVS friction anisotropy, and demonstrated that the longitudinal direction exhibited a larger ratio of friction change. Next, we proposed a sensible CAVS, capable of providing a variable-friction mechanism, and tested its sensing and control systems in operations requiring switching between sliding and stable-grasping modes. Friction sensing was performed using an embedded camera, and we developed a gripper using the sensible CAVS, considering the CAVS friction anisotropy. In CAVS, the low-friction mode corresponds to a small grasping force, while the high-friction mode corresponds to a greater grasping force. Therefore, by controlling only the friction mode, the gripper mode can be set to either the sliding or stable-grasping mode. Based on this feature, a methodology for controlling the contact mode was constructed. We demonstrated a manipulation involving sliding and stable grasping, and thus verified the efficacy of the developed sensible CAVS.
Soft robotic hand with finger-bending/friction-reduction switching mechanism through 1-degree-of-freedom flow control
Mar 28, 2022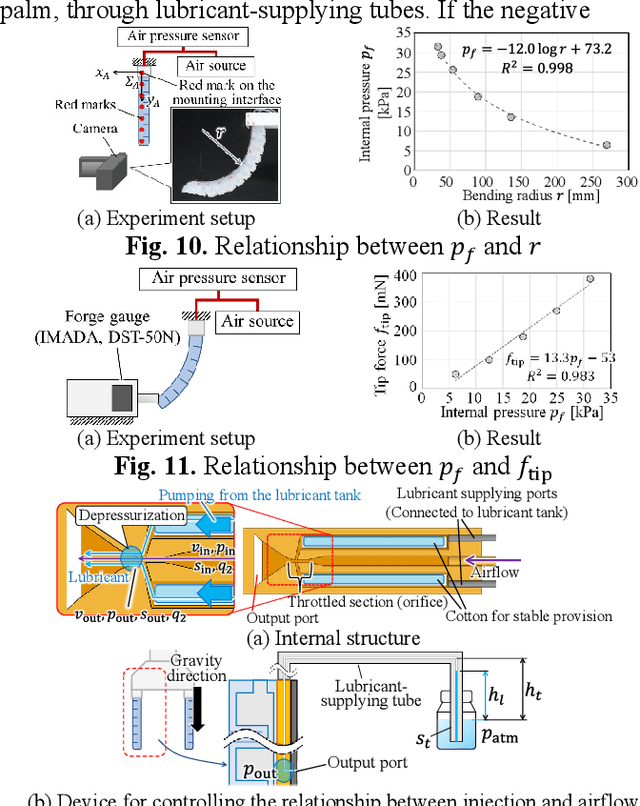
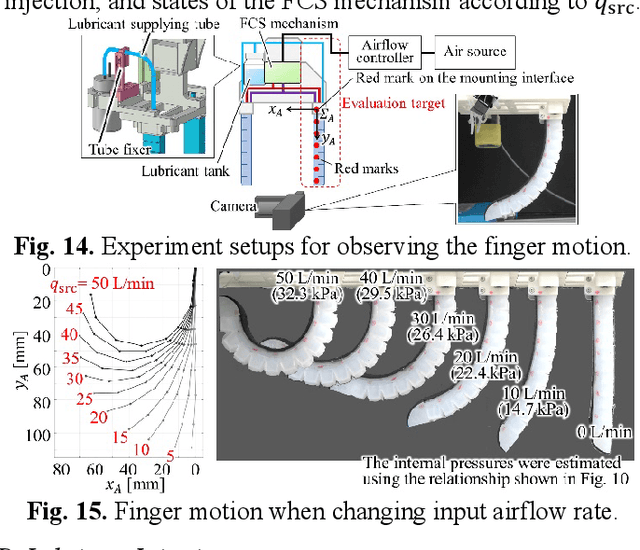
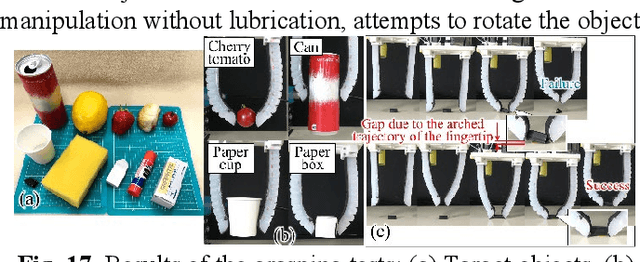
This paper proposes a novel pneumatic soft robotic hand that incorporates a mechanism that can switch the airflow path using a single airflow control. The developed hand can control the finger motion and operate the surface friction variable mechanism. In the friction variable mechanism, a lubricant is injected onto the high-friction finger surface to reduce surface friction. To inject the lubrication using a positive-pressure airflow, the Venturi effect is applied. The design and evaluation of the airflow-path switching and friction variable mechanisms are described. Moreover, the entire design of a soft robotic hand equipped with these mechanisms is presented. The performance was validated through grasping, placing, and manipulation tests.