 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributionally Robust Causal Abstractions
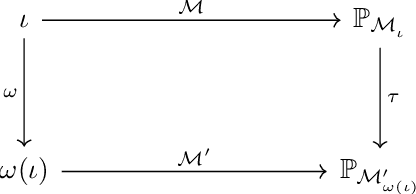
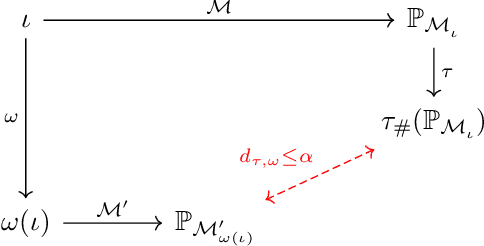
Oct 06, 2025Causal Abstraction (CA) theory provides a principled framework for relating causal models that describe the same system at different levels of granularity while ensuring interventional consistency between them. Recently, several approaches for learning CAs have been proposed, but all assume fixed and well-specified exogenous distributions, making them vulnerable to environmental shifts and misspecification. In this work, we address these limitations by introducing the first class of distributionally robust CAs and their associated learning algorithms. The latter cast robust causal abstraction learning as a constrained min-max optimization problem with Wasserstein ambiguity sets. We provide theoretical results, for both empirical and Gaussian environments, leading to principled selection of the level of robustness via the radius of these sets. Furthermore, we present empirical evidence across different problems and CA learning methods, demonstrating our framework's robustness not only to environmental shifts but also to structural model and intervention mapping misspecification.
Causally Abstracted Multi-armed Bandits
Apr 26, 2024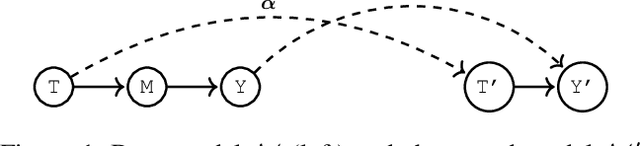


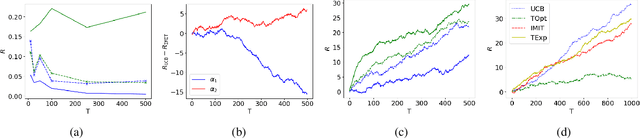
Multi-armed bandits (MAB) and causal MABs (CMAB) are established frameworks for decision-making problems. The majority of prior work typically studies and solves individual MAB and CMAB in isolation for a given problem and associated data. However, decision-makers are often faced with multiple related problems and multi-scale observations where joint formulations are needed in order to efficiently exploit the problem structures and data dependencies. Transfer learning for CMABs addresses the situation where models are defined on identical variables, although causal connections may differ. In this work, we extend transfer learning to setups involving CMABs defined on potentially different variables, with varying degrees of granularity, and related via an abstraction map. Formally, we introduce the problem of causally abstracted MABs (CAMABs) by relying on the theory of causal abstraction in order to express a rigorous abstraction map. We propose algorithms to learn in a CAMAB, and study their regret. We illustrate the limitations and the strengths of our algorithms on a real-world scenario related to online advertising.
Interventionally Consistent Surrogates for Agent-based Simulators
Dec 18, 2023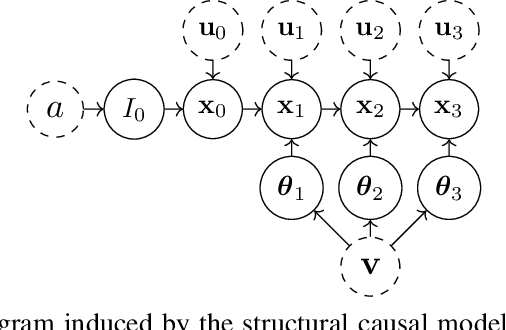
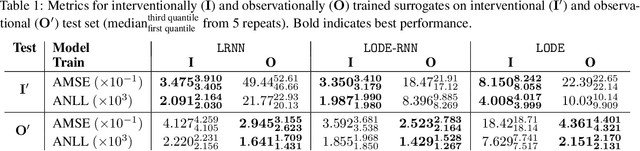
Agent-based simulators provide granular representations of complex intelligent systems by directly modelling the interactions of the system's constituent agents. Their high-fidelity nature enables hyper-local policy evaluation and testing of what-if scenarios, but is associated with large computational costs that inhibits their widespread use. Surrogate models can address these computational limitations, but they must behave consistently with the agent-based model under policy interventions of interest. In this paper, we capitalise on recent developments on causal abstractions to develop a framework for learning interventionally consistent surrogate models for agent-based simulators. Our proposed approach facilitates rapid experimentation with policy interventions in complex systems, while inducing surrogates to behave consistently with high probability with respect to the agent-based simulator across interventions of interest. We demonstrate with empirical studies that observationally trained surrogates can misjudge the effect of interventions and misguide policymakers towards suboptimal policies, while surrogates trained for interventional consistency with our proposed method closely mimic the behaviour of an agent-based model under interventions of interest.
Causal Optimal Transport of Abstractions
Dec 13, 2023



Causal abstraction (CA) theory establishes formal criteria for relating multiple structural causal models (SCMs) at different levels of granularity by defining maps between them. These maps have significant relevance for real-world challenges such as synthesizing causal evidence from multiple experimental environments, learning causally consistent representations at different resolutions, and linking interventions across multiple SCMs. In this work, we propose COTA, the first method to learn abstraction maps from observational and interventional data without assuming complete knowledge of the underlying SCMs. In particular, we introduce a multi-marginal Optimal Transport (OT) formulation that enforces do-calculus causal constraints, together with a cost function that relies on interventional information. We extensively evaluate COTA on synthetic and real world problems, and showcase its advantages over non-causal, independent and aggregated COTA formulations. Finally, we demonstrate the efficiency of our method as a data augmentation tool by comparing it against the state-of-the-art CA learning framework, which assumes fully specified SCMs, on a real-world downstream task.