 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVariational Formulation of the Particle Flow Particle Filter
May 06, 2025This paper provides a formulation of the particle flow particle filter from the perspective of variational inference. We show that the transient density used to derive the particle flow particle filter follows a time-scaled trajectory of the Fisher-Rao gradient flow in the space of probability densities. The Fisher-Rao gradient flow is obtained as a continuous-time algorithm for variational inference, minimizing the Kullback-Leibler divergence between a variational density and the true posterior density.
Sensor-Based Distributionally Robust Control for Safe Robot Navigation in Dynamic Environments
May 28, 2024We introduce a novel method for safe mobile robot navigation in dynamic, unknown environments, utilizing onboard sensing to impose safety constraints without the need for accurate map reconstruction. Traditional methods typically rely on detailed map information to synthesize safe stabilizing controls for mobile robots, which can be computationally demanding and less effective, particularly in dynamic operational conditions. By leveraging recent advances in distributionally robust optimization, we develop a distributionally robust control barrier function (DR-CBF) constraint that directly processes range sensor data to impose safety constraints. Coupling this with a control Lyapunov function (CLF) for path tracking, we demonstrate that our CLF-DR-CBF control synthesis method achieves safe, efficient, and robust navigation in uncertain dynamic environments. We demonstrate the effectiveness of our approach in simulated and real autonomous robot navigation experiments, marking a substantial advancement in real-time safety guarantees for mobile robots.
EAST: Environment Aware Safe Tracking using Planning and Control Co-Design
Oct 02, 2023This paper considers the problem of autonomous robot navigation in unknown environments with moving obstacles. We propose a new method that systematically puts planning, motion prediction and safety metric design together to achieve environmental adaptive and safe navigation. This algorithm balances optimality in travel distance and safety with respect to passing clearance. Robot adapts progress speed adaptively according to the sensed environment, being fast in wide open areas and slow down in narrow passages and taking necessary maneuvers to avoid dangerous incoming obstacles. In our method, directional distance measure, conic-shape motion prediction and custom costmap are integrated properly to evaluate system risk accurately with respect to local geometry of surrounding environments. Using such risk estimation, reference governor technique and control barrier function are worked together to enable adaptive and safe path tracking in dynamical environments. We validate our algorithm extensively both in simulation and challenging real-world environments.
Distributionally Robust Lyapunov Function Search Under Uncertainty
Dec 03, 2022
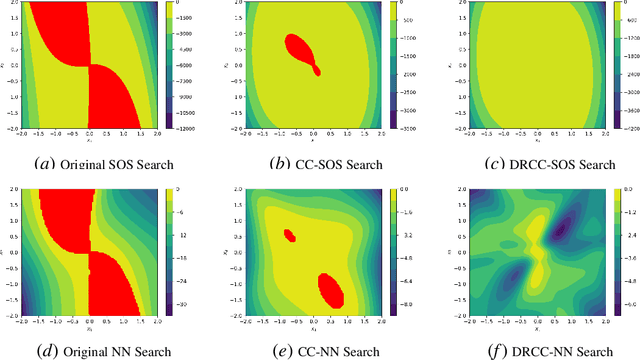

This paper develops methods for proving Lyapunov stability of dynamical systems subject to disturbances with an unknown distribution. We assume only a finite set of disturbance samples is available and that the true online disturbance realization may be drawn from a different distribution than the given samples. We formulate an optimization problem to search for a sum-of-squares (SOS) Lyapunov function and introduce a distributionally robust version of the Lyapunov function derivative constraint. We show that this constraint may be reformulated as several SOS constraints, ensuring that the search for a Lyapunov function remains in the class of SOS polynomial optimization problems. For general systems, we provide a distributionally robust chance-constrained formulation for neural network Lyapunov function search. Simulations demonstrate the validity and efficiency of either formulation on non-linear uncertain dynamical systems.
Safe and Stable Control Synthesis for Uncertain System Models via Distributionally Robust Optimization
Oct 04, 2022


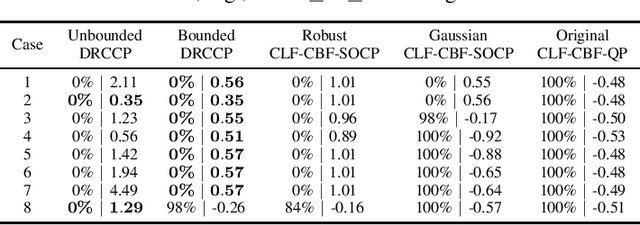
This paper considers enforcing safety and stability of dynamical systems in the presence of model uncertainty. Safety and stability constraints may be specified using a control barrier function (CBF) and a control Lyapunov function (CLF), respectively. To take model uncertainty into account, robust and chance formulations of the constraints are commonly considered. However, this requires known error bounds or a known distribution for the model uncertainty, and the resulting formulations may suffer from over-conservatism or over-confidence. In this paper, we assume that only a finite set of model parametric uncertainty samples is available and formulate a distributionally robust chance-constrained program (DRCCP) for control synthesis with CBF safety and CLF stability guarantees. To enable the efficient computation of control inputs during online execution, we provide a reformulation of the DRCCP as a second-order cone program (SOCP). Our formulation is evaluated in an adaptive cruise control example in comparison to 1) a baseline CLF-CBF quadratic programming approach, 2) a robust approach that assumes known error bounds of the system uncertainty, and 3) a chance-constrained approach that assumes a known Gaussian Process distribution of the uncertainty.