 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSotopia-RL: Reward Design for Social Intelligence
Aug 05, 2025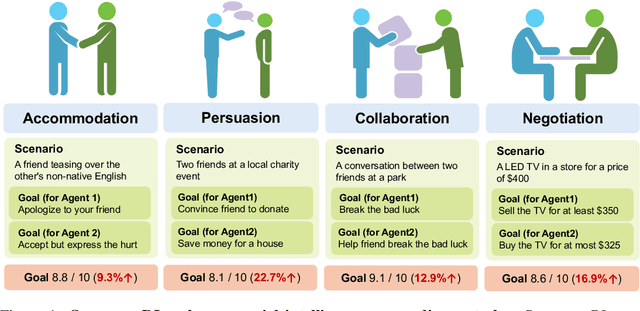
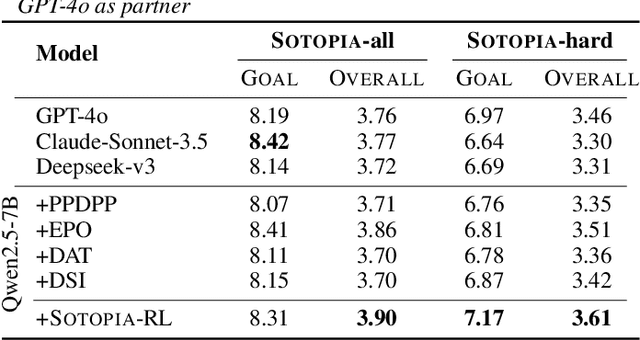
Social intelligence has become a critical capability for large language models (LLMs), enabling them to engage effectively in real-world social tasks such as accommodation, persuasion, collaboration, and negotiation. Reinforcement learning (RL) is a natural fit for training socially intelligent agents because it allows models to learn sophisticated strategies directly through social interactions. However, social interactions have two key characteristics that set barriers for RL training: (1) partial observability, where utterances have indirect and delayed effects that complicate credit assignment, and (2) multi-dimensionality, where behaviors such as rapport-building or knowledge-seeking contribute indirectly to goal achievement. These characteristics make Markov decision process (MDP)-based RL with single-dimensional episode-level rewards inefficient and unstable. To address these challenges, we propose Sotopia-RL, a novel framework that refines coarse episode-level feedback into utterance-level, multi-dimensional rewards. Utterance-level credit assignment mitigates partial observability by attributing outcomes to individual utterances, while multi-dimensional rewards capture the full richness of social interactions and reduce reward hacking. Experiments in Sotopia, an open-ended social learning environment, demonstrate that Sotopia-RL achieves state-of-the-art social goal completion scores (7.17 on Sotopia-hard and 8.31 on Sotopia-full), significantly outperforming existing approaches. Ablation studies confirm the necessity of both utterance-level credit assignment and multi-dimensional reward design for RL training. Our implementation is publicly available at: https://github.com/sotopia-lab/sotopia-rl.
How Cohesive Are Community Search Results on Online Social Networks?: An Experimental Evaluation
May 01, 2025


Recently, numerous community search methods for large graphs have been proposed, at the core of which is defining and measuring cohesion. This paper experimentally evaluates the effectiveness of these community search algorithms w.r.t. cohesiveness in the context of online social networks. Social communities are formed and developed under the influence of group cohesion theory, which has been extensively studied in social psychology. However, current generic methods typically measure cohesiveness using structural or attribute-based approaches and overlook domain-specific concepts such as group cohesion. We introduce five novel psychology-informed cohesiveness measures, based on the concept of group cohesion from social psychology, and propose a novel framework called CHASE for evaluating eight representative community search algorithms w.r.t. these measures on online social networks. Our analysis reveals that there is no clear correlation between structural and psychological cohesiveness, and no algorithm effectively identifies psychologically cohesive communities in online social networks. This study provides new insights that could guide the development of future community search methods.
DualPrompt-MedCap: A Dual-Prompt Enhanced Approach for Medical Image Captioning
Apr 13, 2025



Medical image captioning via vision-language models has shown promising potential for clinical diagnosis assistance. However, generating contextually relevant descriptions with accurate modality recognition remains challenging. We present DualPrompt-MedCap, a novel dual-prompt enhancement framework that augments Large Vision-Language Models (LVLMs) through two specialized components: (1) a modality-aware prompt derived from a semi-supervised classification model pretrained on medical question-answer pairs, and (2) a question-guided prompt leveraging biomedical language model embeddings. To address the lack of captioning ground truth, we also propose an evaluation framework that jointly considers spatial-semantic relevance and medical narrative quality. Experiments on multiple medical datasets demonstrate that DualPrompt-MedCap outperforms the baseline BLIP-3 by achieving a 22% improvement in modality recognition accuracy while generating more comprehensive and question-aligned descriptions. Our method enables the generation of clinically accurate reports that can serve as medical experts' prior knowledge and automatic annotations for downstream vision-language tasks.
Implicit U-KAN2.0: Dynamic, Efficient and Interpretable Medical Image Segmentation
Mar 05, 2025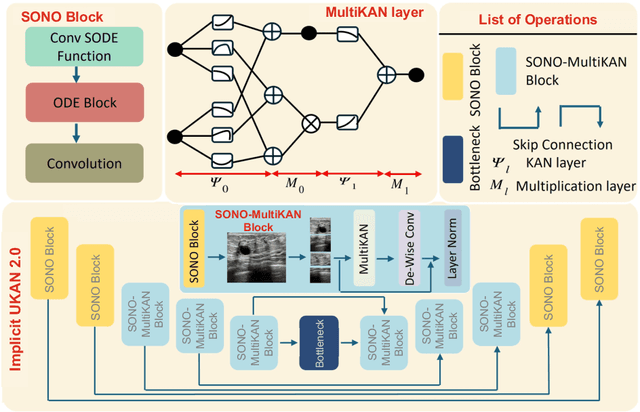
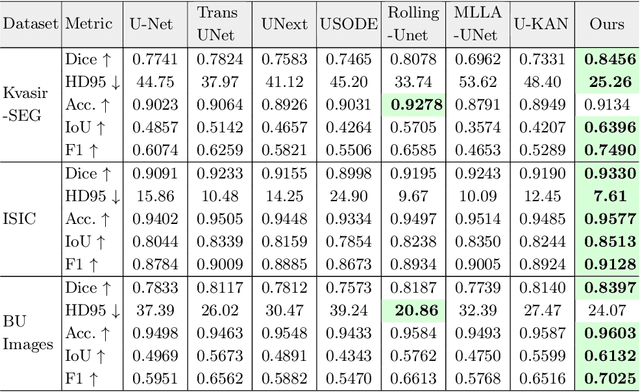
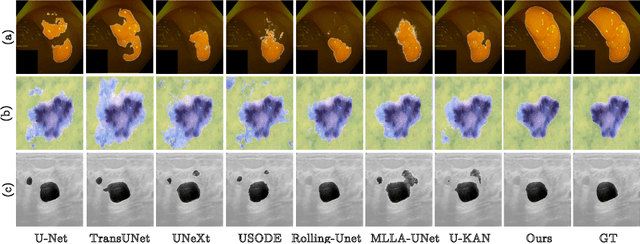

Image segmentation is a fundamental task in both image analysis and medical applications. State-of-the-art methods predominantly rely on encoder-decoder architectures with a U-shaped design, commonly referred to as U-Net. Recent advancements integrating transformers and MLPs improve performance but still face key limitations, such as poor interpretability, difficulty handling intrinsic noise, and constrained expressiveness due to discrete layer structures, often lacking a solid theoretical foundation.In this work, we introduce Implicit U-KAN 2.0, a novel U-Net variant that adopts a two-phase encoder-decoder structure. In the SONO phase, we use a second-order neural ordinary differential equation (NODEs), called the SONO block, for a more efficient, expressive, and theoretically grounded modeling approach. In the SONO-MultiKAN phase, we integrate the second-order NODEs and MultiKAN layer as the core computational block to enhance interpretability and representation power. Our contributions are threefold. First, U-KAN 2.0 is an implicit deep neural network incorporating MultiKAN and second order NODEs, improving interpretability and performance while reducing computational costs. Second, we provide a theoretical analysis demonstrating that the approximation ability of the MultiKAN block is independent of the input dimension. Third, we conduct extensive experiments on a variety of 2D and a single 3D dataset, demonstrating that our model consistently outperforms existing segmentation networks.
3D Room Layout Estimation from a Cubemap of Panorama Image via Deep Manhattan Hough Transform
Jul 19, 2022

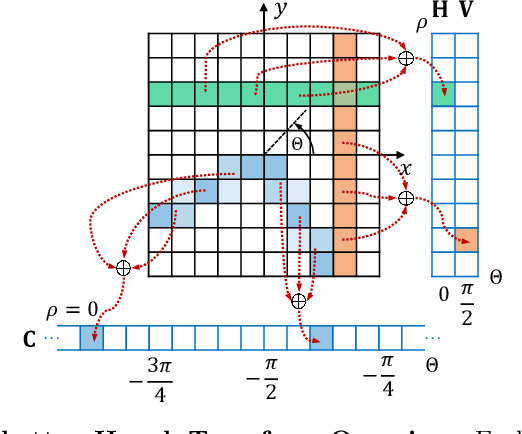
Significant geometric structures can be compactly described by global wireframes in the estimation of 3D room layout from a single panoramic image. Based on this observation, we present an alternative approach to estimate the walls in 3D space by modeling long-range geometric patterns in a learnable Hough Transform block. We transform the image feature from a cubemap tile to the Hough space of a Manhattan world and directly map the feature to the geometric output. The convolutional layers not only learn the local gradient-like line features, but also utilize the global information to successfully predict occluded walls with a simple network structure. Unlike most previous work, the predictions are performed individually on each cubemap tile, and then assembled to get the layout estimation. Experimental results show that we achieve comparable results with recent state-of-the-art in prediction accuracy and performance. Code is available at https://github.com/Starrah/DMH-Net.