 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCode Evolution for Control: Synthesizing Policies via LLM-Driven Evolutionary Search
Jan 11, 2026Designing effective control policies for autonomous systems remains a fundamental challenge, traditionally addressed through reinforcement learning or manual engineering. While reinforcement learning has achieved remarkable success, it often suffers from high sample complexity, reward shaping difficulties, and produces opaque neural network policies that are hard to interpret or verify. Manual design, on the other hand, requires substantial domain expertise and struggles to scale across diverse tasks. In this work, we demonstrate that LLM-driven evolutionary search can effectively synthesize interpretable control policies in the form of executable code. By treating policy synthesis as a code evolution problem, we harness the LLM's prior knowledge of programming patterns and control heuristics while employing evolutionary search to explore the solution space systematically. We implement our approach using EvoToolkit, a framework that seamlessly integrates LLM-driven evolution with customizable fitness evaluation. Our method iteratively evolves populations of candidate policy programs, evaluating them against task-specific objectives and selecting superior individuals for reproduction. This process yields compact, human-readable control policies that can be directly inspected, modified, and formally verified. This work highlights the potential of combining foundation models with evolutionary computation for synthesizing trustworthy control policies in autonomous systems. Code is available at https://github.com/pgg3/EvoControl.
A Theoretical Analysis of Analogy-Based Evolutionary Transfer Optimization
Mar 27, 2025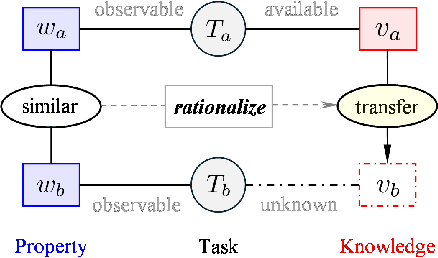

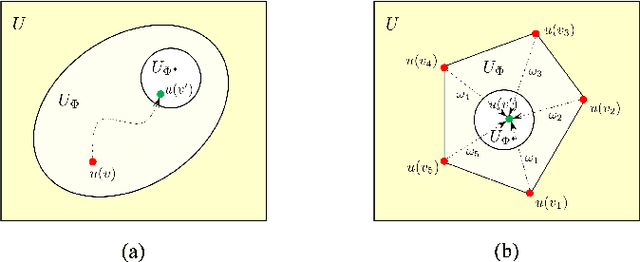
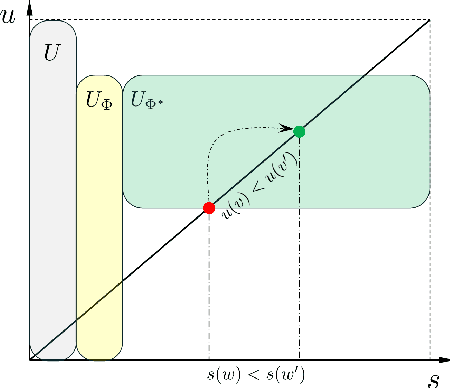
Evolutionary transfer optimization (ETO) has been gaining popularity in research over the years due to its outstanding knowledge transfer ability to address various challenges in optimization. However, a pressing issue in this field is that the invention of new ETO algorithms has far outpaced the development of fundamental theories needed to clearly understand the key factors contributing to the success of these algorithms for effective generalization. In response to this challenge, this study aims to establish theoretical foundations for analogy-based ETO, specifically to support various algorithms that frequently reference a key concept known as similarity. First, we introduce analogical reasoning and link its subprocesses to three key issues in ETO. Then, we develop theories for analogy-based knowledge transfer, rooted in the principles that underlie the subprocesses. Afterwards, we present two theorems related to the performance gain of analogy-based knowledge transfer, namely unconditionally nonnegative performance gain and conditionally positive performance gain, to theoretically demonstrate the effectiveness of various analogy-based ETO methods. Last but not least, we offer a novel insight into analogy-based ETO that interprets its conditional superiority over traditional evolutionary optimization through the lens of the no free lunch theorem for optimization.
Towards Multi-Objective High-Dimensional Feature Selection via Evolutionary Multitasking
Jan 03, 2024


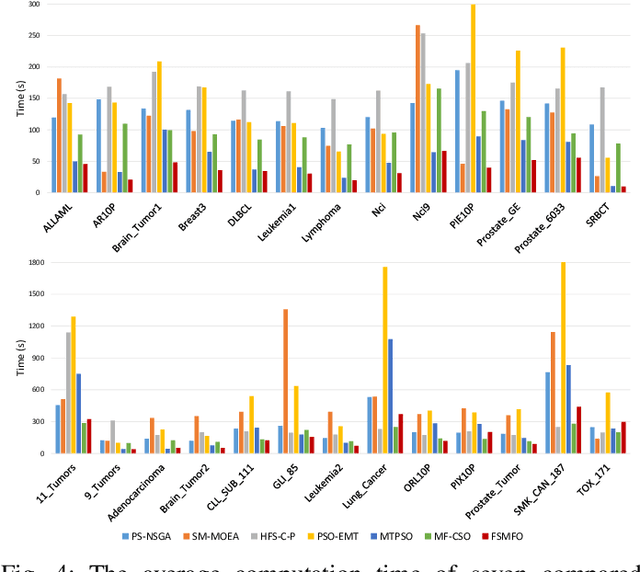
Evolutionary Multitasking (EMT) paradigm, an emerging research topic in evolutionary computation, has been successfully applied in solving high-dimensional feature selection (FS) problems recently. However, existing EMT-based FS methods suffer from several limitations, such as a single mode of multitask generation, conducting the same generic evolutionary search for all tasks, relying on implicit transfer mechanisms through sole solution encodings, and employing single-objective transformation, which result in inadequate knowledge acquisition, exploitation, and transfer. To this end, this paper develops a novel EMT framework for multiobjective high-dimensional feature selection problems, namely MO-FSEMT. In particular, multiple auxiliary tasks are constructed by distinct formulation methods to provide diverse search spaces and information representations and then simultaneously addressed with the original task through a multi-slover-based multitask optimization scheme. Each task has an independent population with task-specific representations and is solved using separate evolutionary solvers with different biases and search preferences. A task-specific knowledge transfer mechanism is designed to leverage the advantage information of each task, enabling the discovery and effective transmission of high-quality solutions during the search process. Comprehensive experimental results demonstrate that our MO-FSEMT framework can achieve overall superior performance compared to the state-of-the-art FS methods on 26 datasets. Moreover, the ablation studies verify the contributions of different components of the proposed MO-FSEMT.