 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman Part-wise 3D Motion Context Learning for Sign Language Recognition
Aug 18, 2023



In this paper, we propose P3D, the human part-wise motion context learning framework for sign language recognition. Our main contributions lie in two dimensions: learning the part-wise motion context and employing the pose ensemble to utilize 2D and 3D pose jointly. First, our empirical observation implies that part-wise context encoding benefits the performance of sign language recognition. While previous methods of sign language recognition learned motion context from the sequence of the entire pose, we argue that such methods cannot exploit part-specific motion context. In order to utilize part-wise motion context, we propose the alternating combination of a part-wise encoding Transformer (PET) and a whole-body encoding Transformer (WET). PET encodes the motion contexts from a part sequence, while WET merges them into a unified context. By learning part-wise motion context, our P3D achieves superior performance on WLASL compared to previous state-of-the-art methods. Second, our framework is the first to ensemble 2D and 3D poses for sign language recognition. Since the 3D pose holds rich motion context and depth information to distinguish the words, our P3D outperformed the previous state-of-the-art methods employing a pose ensemble.
Cyclic Test-Time Adaptation on Monocular Video for 3D Human Mesh Reconstruction
Aug 12, 2023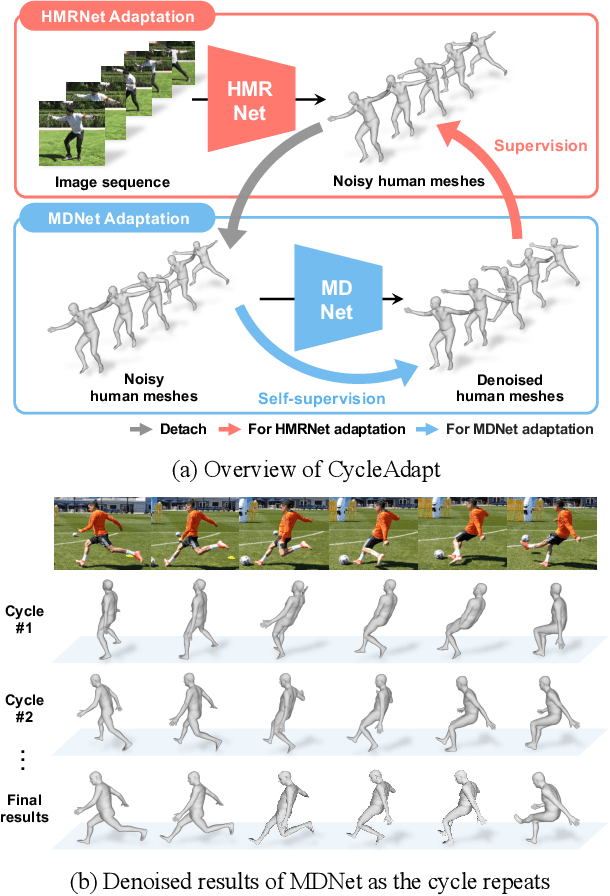



Despite recent advances in 3D human mesh reconstruction, domain gap between training and test data is still a major challenge. Several prior works tackle the domain gap problem via test-time adaptation that fine-tunes a network relying on 2D evidence (e.g., 2D human keypoints) from test images. However, the high reliance on 2D evidence during adaptation causes two major issues. First, 2D evidence induces depth ambiguity, preventing the learning of accurate 3D human geometry. Second, 2D evidence is noisy or partially non-existent during test time, and such imperfect 2D evidence leads to erroneous adaptation. To overcome the above issues, we introduce CycleAdapt, which cyclically adapts two networks: a human mesh reconstruction network (HMRNet) and a human motion denoising network (MDNet), given a test video. In our framework, to alleviate high reliance on 2D evidence, we fully supervise HMRNet with generated 3D supervision targets by MDNet. Our cyclic adaptation scheme progressively elaborates the 3D supervision targets, which compensate for imperfect 2D evidence. As a result, our CycleAdapt achieves state-of-the-art performance compared to previous test-time adaptation methods. The codes are available at https://github.com/hygenie1228/CycleAdapt_RELEASE.
Recovering 3D Hand Mesh Sequence from a Single Blurry Image: A New Dataset and Temporal Unfolding
Mar 27, 2023Hands, one of the most dynamic parts of our body, suffer from blur due to their active movements. However, previous 3D hand mesh recovery methods have mainly focused on sharp hand images rather than considering blur due to the absence of datasets providing blurry hand images. We first present a novel dataset BlurHand, which contains blurry hand images with 3D groundtruths. The BlurHand is constructed by synthesizing motion blur from sequential sharp hand images, imitating realistic and natural motion blurs. In addition to the new dataset, we propose BlurHandNet, a baseline network for accurate 3D hand mesh recovery from a blurry hand image. Our BlurHandNet unfolds a blurry input image to a 3D hand mesh sequence to utilize temporal information in the blurry input image, while previous works output a static single hand mesh. We demonstrate the usefulness of BlurHand for the 3D hand mesh recovery from blurry images in our experiments. The proposed BlurHandNet produces much more robust results on blurry images while generalizing well to in-the-wild images. The training codes and BlurHand dataset are available at https://github.com/JaehaKim97/BlurHand_RELEASE.
HandOccNet: Occlusion-Robust 3D Hand Mesh Estimation Network
Mar 28, 2022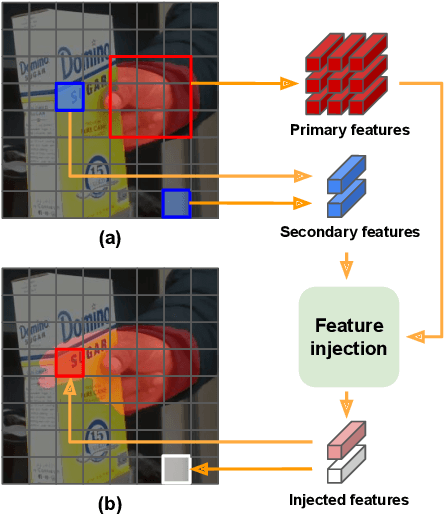
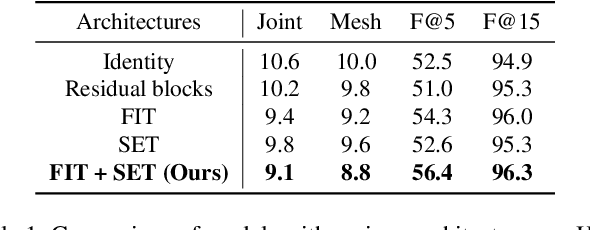
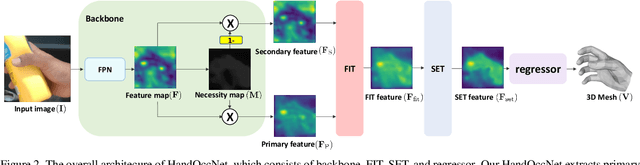
Hands are often severely occluded by objects, which makes 3D hand mesh estimation challenging. Previous works often have disregarded information at occluded regions. However, we argue that occluded regions have strong correlations with hands so that they can provide highly beneficial information for complete 3D hand mesh estimation. Thus, in this work, we propose a novel 3D hand mesh estimation network HandOccNet, that can fully exploits the information at occluded regions as a secondary means to enhance image features and make it much richer. To this end, we design two successive Transformer-based modules, called feature injecting transformer (FIT) and self- enhancing transformer (SET). FIT injects hand information into occluded region by considering their correlation. SET refines the output of FIT by using a self-attention mechanism. By injecting the hand information to the occluded region, our HandOccNet reaches the state-of-the-art performance on 3D hand mesh benchmarks that contain challenging hand-object occlusions. The codes are available in: https://github.com/namepllet/HandOccNet.
* also attached the supplementary material