 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlagellar Swimming at Low Reynolds Numbers: Zoospore-Inspired Robotic Swimmers with Dual Flagella for High-Speed Locomotion
Dec 07, 2024Traditional locomotion strategies become ineffective at low Reynolds numbers, where viscous forces predominate over inertial forces. To adapt, microorganisms have evolved specialized structures like cilia and flagella for efficient maneuvering in viscous environments. Among these organisms, Phytophthora zoospores demonstrate unique locomotion mechanisms that allow them to rapidly spread and attack new hosts while expending minimal energy. In this study, we present the design, fabrication, and testing of a zoospore-inspired robot, which leverages dual flexible flagella and oscillatory propulsion mechanisms to emulate the natural swimming behavior of zoospores. Our experiments and theoretical model reveal that both flagellar length and oscillation frequency strongly influence the robot's propulsion speed, with longer flagella and higher frequencies yielding enhanced performance. Additionally, the anterior flagellum, which generates a pulling force on the body, plays a dominant role in enhancing propulsion efficiency compared to the posterior flagellum's pushing force. This is a significant experimental finding, as it would be challenging to observe directly in biological zoospores, which spontaneously release the posterior flagellum when the anterior flagellum detaches. This work contributes to the development of advanced microscale robotic systems with potential applications in medical, environmental, and industrial fields. It also provides a valuable platform for studying biological zoospores and their unique locomotion strategies.
A variational approach to geometric mechanics for undulating robotic locomotion
Sep 17, 2024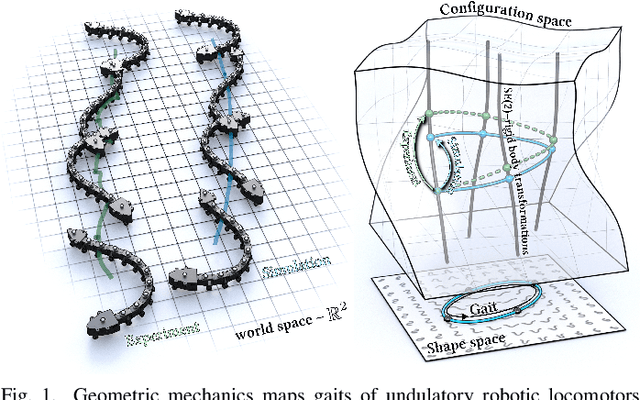
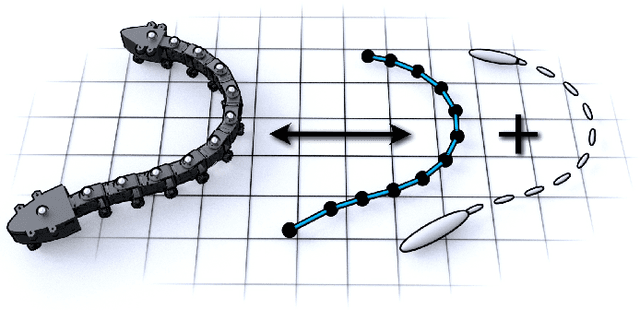
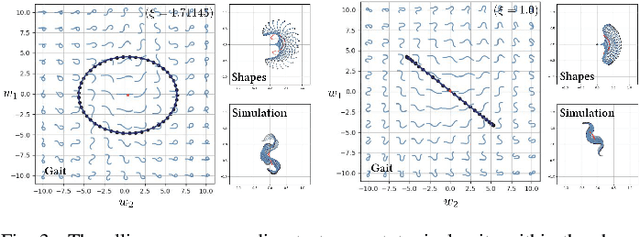
Limbless organisms of all sizes use undulating patterns of self-deformation to locomote. Geometric mechanics, which maps deformations to motions, provides a powerful framework to formalize and investigate the theoretical properties and limitations of such modes of locomotion. However, the inherent level of abstraction poses a challenge when bridging the gap between theory or simulations and laboratory experiments. We investigate the challenges of modeling motion trajectories of an undulating robotic locomotor by comparing experiments and simulations performed with a variational integrator. Despite the extensive simplifications that the model based on a geometric variation principle entails, the simulations show good agreement on average. Notably, our approach merely requires the knowledge of the \emph{dissipation metric} -- a Riemannian metric on the configuration space, which can in practice be approximated by means closely resembling \emph{resistive force theory}.
Embodied Design for Enhanced Flipper-Based Locomotion in Complex Terrains
May 22, 2024Robots are becoming increasingly essential for traversing complex environments such as disaster areas, extraterrestrial terrains, and marine environments. Yet, their potential is often limited by mobility and adaptability constraints. In nature, various animals have evolved finely tuned designs and anatomical features that enable efficient locomotion in diverse environments. Sea turtles, for instance, possess specialized flippers that facilitate both long-distance underwater travel and adept maneuvers across a range of coastal terrains. Building on the principles of embodied intelligence and drawing inspiration from sea turtle hatchings, this paper examines the critical interplay between a robot's physical form and its environmental interactions, focusing on how morphological traits and locomotive behaviors affect terrestrial navigation. We present a bio-inspired robotic system and study the impacts of flipper/body morphology and gait patterns on its terrestrial mobility across diverse terrains ranging from sand to rocks. Evaluating key performance metrics such as speed and cost of transport, our experimental results highlight adaptive designs as crucial for multi-terrain robotic mobility to achieve not only speed and efficiency but also the versatility needed to tackle the varied and complex terrains encountered in real-world applications.
Soft Wrist Exosuit Actuated by Fabric Pneumatic Artificial Muscles
Oct 27, 2023Recently, soft actuator-based exosuits have gained interest, due to their high strength-to-weight ratio, inherent safety, and low cost. We present a novel wrist exosuit actuated by fabric pneumatic artificial muscles that can move the wrist in flexion/extension and ulnar/radial deviation. We derive a model representing the torque exerted by the exosuit and introduce a model-based optimization methodology for the selection of placement parameters of the exosuit muscles. We evaluate the accuracy of the model by measuring the exosuit torques throughout the full range of wrist flexion/extension. When accounting for the displacement of the mounting points, the model predicts the exosuit torque with a mean absolute error of 0.279 Nm, which is 26.1% of the average measured torque. To explore the capabilities of the exosuit to move the human body, we measure its range of motion on a passive human wrist; the exosuit is able to achieve 55.0% of the active biological range in flexion, 69.1% in extension, 68.6% in ulnar deviation, and 68.4% in radial deviation. Finally, we demonstrate the device controlling the passive human wrist to move to a desired orientation in the flexion/extension plane and along a two-degree-of-freedom trajectory.
Machine Learning-Driven Burrowing with a Snake-Like Robot
Sep 19, 2023Subterranean burrowing is inherently difficult for robots because of the high forces experienced as well as the high amount of uncertainty in this domain. Because of the difficulty in modeling forces in granular media, we propose the use of a novel machine-learning control strategy to obtain optimal techniques for vertical self-burrowing. In this paper, we realize a snake-like bio-inspired robot that is equipped with an IMU and two triple-axis magnetometers. Utilizing magnetic field strength as an analog for depth, a novel deep learning architecture was proposed based on sinusoidal and random data in order to obtain a more efficient strategy for vertical self-burrowing. This strategy was able to outperform many other standard burrowing techniques and was able to automatically reach targeted burrowing depths. We hope these results will serve as a proof of concept for how optimization can be used to unlock the secrets of navigating in the subterranean world more efficiently.
Adjustbot: Bio-Inspired Quadruped Robot with Adjustable Posture and Undulated Body for Challenging Terradynamic Tasks
Sep 18, 2023The ability to modify morphology in response to environmental changes represents a highly advantageous feature in biological organisms, facilitating their adaptation to diverse environmental conditions. While some robots have the capability to modify their morphology by utilizing adaptive body parts, the practical implementation of morphological transformations in robotic systems is still relatively restricted. This limitation can be attributed, in part, to the intricate nature of achieving such transformations, which necessitates the integration of advanced materials, control systems, and design approaches. In nature, a range of morphology adaptation strategies is employed to achieve optimal performance and efficiency, such as those employed by crocodiles and alligators, who adjust their body posture depending on the speed and the surface they traverse on. Drawing inspiration from these biological examples, this paper introduces Adjustbot, a quadruped robot with an undulating body capable of adjusting its body posture. Its adaptive morphology allows it to traverse a wide range of terradynamically challenging surfaces and facilitates avoidance of collisions, navigation through narrow channels, obstacle traversal, and incline negotiation.
Locomotion and Obstacle Avoidance of a Worm-like Soft Robot
Apr 17, 2023This paper presents a soft earthworm robot that is capable of both efficient locomotion and obstacle avoidance. The robot is designed to replicate the unique locomotion mechanisms of earthworms, which enable them to move through narrow and complex environments with ease. The robot consists of multiple segments, each with its own set of actuators, that are connected through rigid plastic joints, allowing for increased adaptability and flexibility in navigating different environments. The robot utilizes proprioceptive sensing and control algorithms to detect and avoid obstacles in real-time while maintaining efficient locomotion. The robot uses a pneumatic actuation system to mimic the circumnutation behavior exhibited by plant roots in order to navigate through complex environments. The results demonstrate the capabilities of the robot for navigating through cluttered environments, making this development significant for various fields of robotics, including search and rescue, environmental monitoring, and medical procedures.
Design of Soft, Modular Appendages for a Bio-inspired Multi-Legged Terrestrial Robot
Apr 09, 2023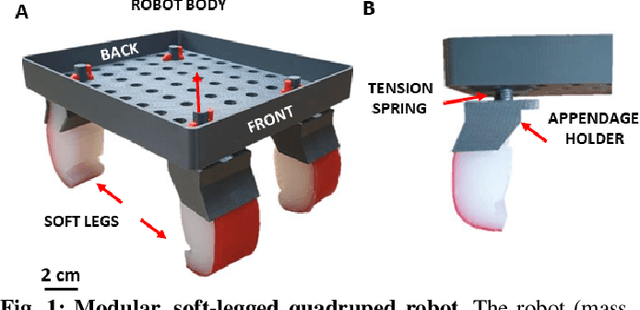
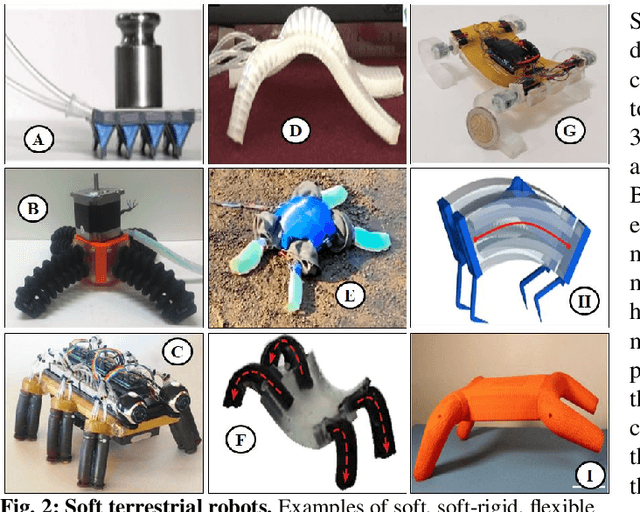
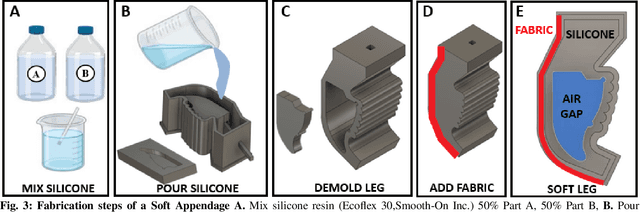
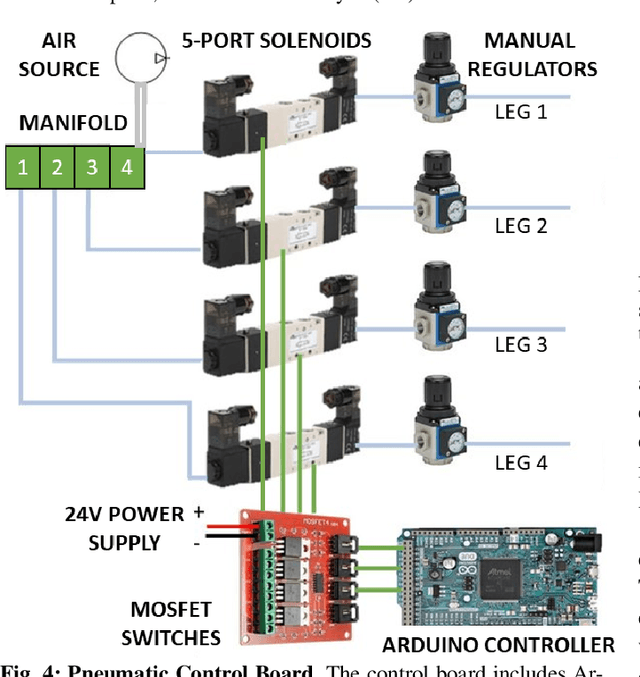
Soft robots have the ability to adapt to their environment, which makes them suitable for use in disaster areas and agricultural fields, where their mobility is constrained by complex terrain. One of the main challenges in developing soft terrestrial robots is that the robot must be soft enough to adapt to its environment, but also rigid enough to exert the required force on the ground to locomote. In this paper, we report a pneumatically driven, soft modular appendage made of silicone for a terrestrial robot capable of generating specific mechanical movement to locomote and transport loads in the desired direction. This two-segmented soft appendage uses actuation in between the joint and the lower segment of the appendage to ensure adequate rigidity to exert the required force to locomote. A prototype of a soft-rigid-bodied tethered physical robot was developed and two sets of experiments were carried out in both air and underwater environments to assess its performance. The experimental results address the effectiveness of the soft appendage to generate adequate force to navigate through various environments and our design method offers a simple, low-cost, and efficient way to develop terradynamically capable soft appendages that can be used in a variety of locomotion applications.
The Effect of Tail Stiffness on a Sprawling Quadruped Locomotion
Apr 09, 2023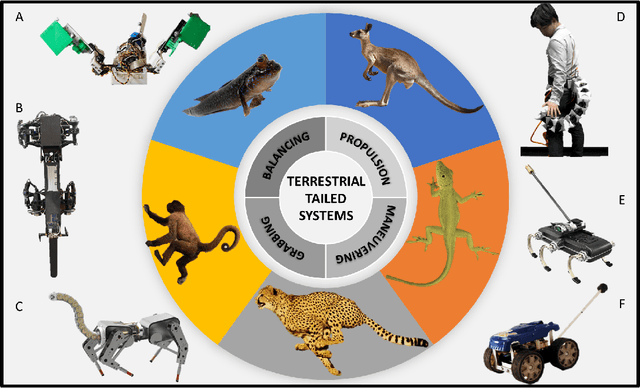
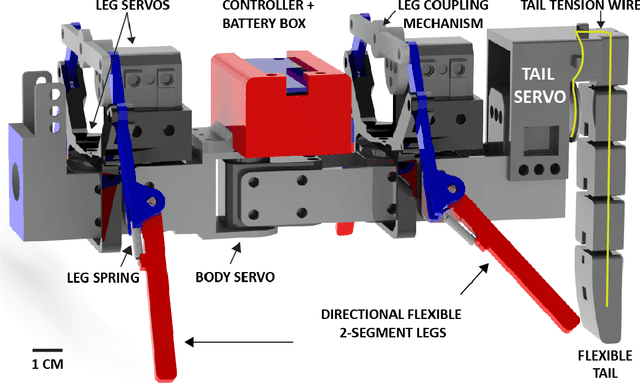
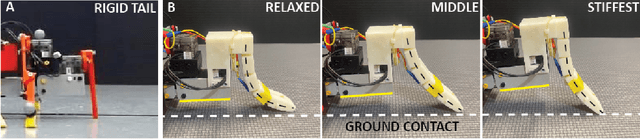
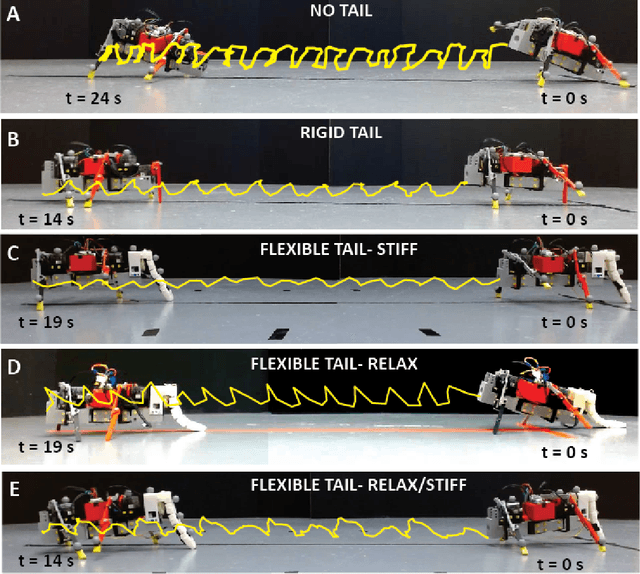
A distinctive feature of quadrupeds that is integral to their locomotion is the tail. Tails serve many purposes in biological systems including propulsion, counterbalance, and stabilization while walking, running, climbing, or jumping. Similarly, tails in legged robots may augment the stability and maneuverability of legged robots by providing an additional point of contact with the ground. However, in the field of terrestrial bio-inspired legged robotics, the tail is often ignored because of the difficulties in design and control. This study will test the hypothesis that a variable stiffness robotic tail can improve the performance of a sprawling quadruped robot by enhancing its stability and maneuverability in various environments. To test our hypothesis, we add a multi-segment, cable-driven, flexible tail, whose stiffness is controlled by a single servo motor in conjunction with a reel and cable system, to the underactuated sprawling quadruped robot. By controlling the stiffness of the tail, we have shown that the stability of locomotion on rough terrain and the climbing ability of the robot are improved compared to the movement with a rigid tail and no tail. The flexible tail design also provides passively controlled tail undulation capabilities through the robot's lateral movement, which contributes to stability.
Stable Real-Time Feedback Control of a Pneumatic Soft Robot
Apr 09, 2023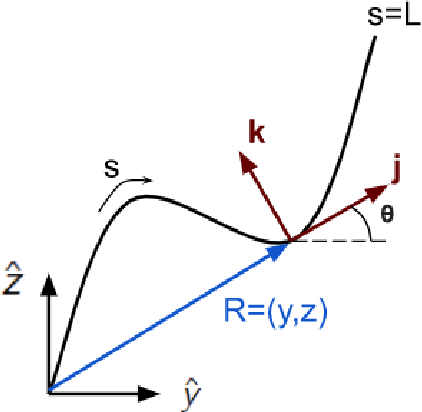
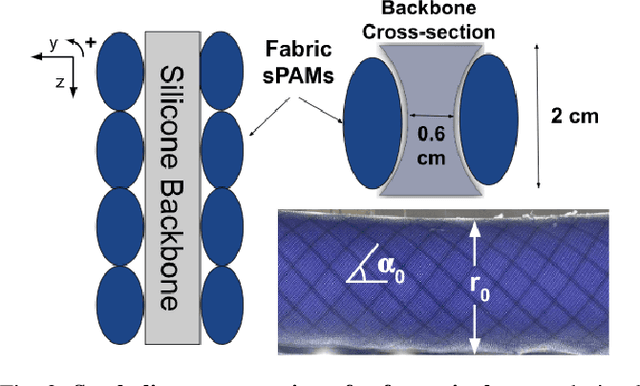
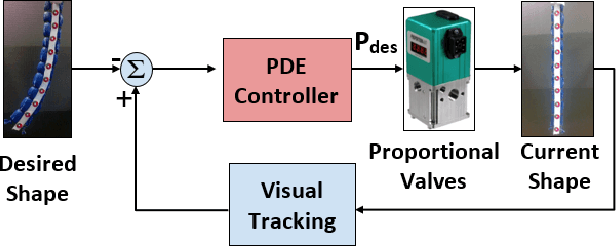
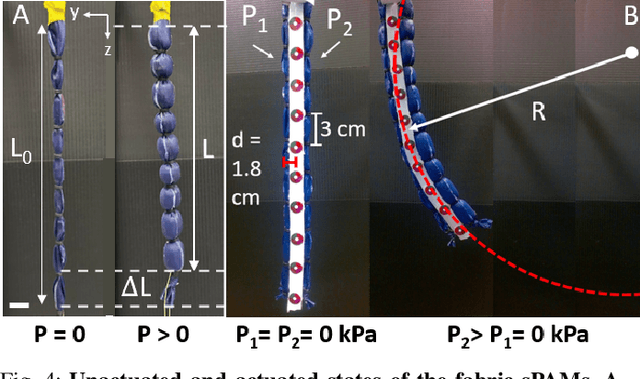
Soft actuators offer compliant and safe interaction with an unstructured environment compared to their rigid counterparts. However, control of these systems is often challenging because they are inherently under-actuated, have infinite degrees of freedom (DoF), and their mechanical properties can change by unknown external loads. Existing works mainly relied on discretization and reduction, suffering from either low accuracy or high computational cost for real-time control purposes. Recently, we presented an infinite-dimensional feedback controller for soft manipulators modeled by partial differential equations (PDEs) based on the Cosserat rod theory. In this study, we examine how to implement this controller in real-time using only a limited number of actuators. To do so, we formulate a convex quadratic programming problem that tunes the feedback gains of the controller in real time such that it becomes realizable by the actuators. We evaluated the controller's performance through experiments on a physical soft robot capable of planar motions and show that the actual controller implemented by the finite-dimensional actuators still preserves the stabilizing property of the desired infinite-dimensional controller. This research fills the gap between the infinite-dimensional control design and finite-dimensional actuation in practice and suggests a promising direction for exploring PDE-based control design for soft robots.