 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStructural Knowledge-Driven Meta-Learning for Task Offloading in Vehicular Networks with Integrated Communications, Sensing and Computing
Feb 25, 2024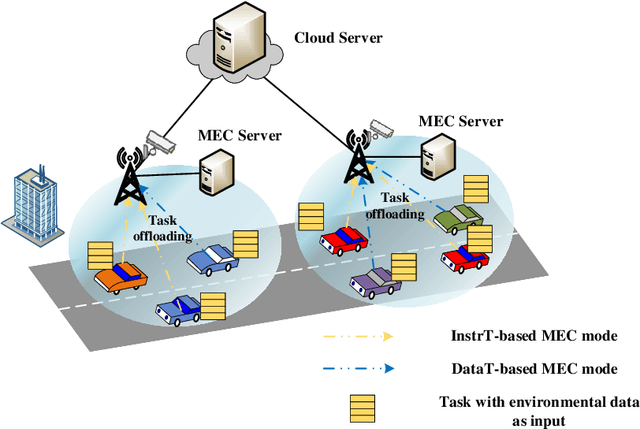
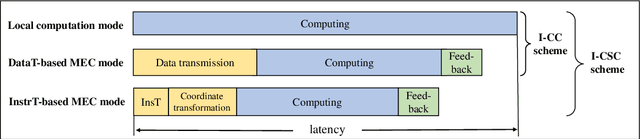
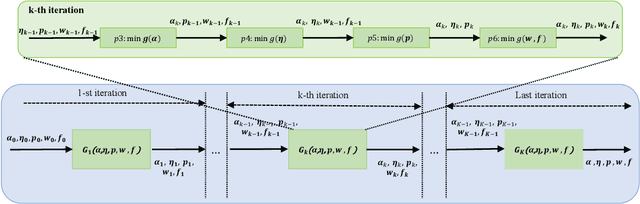
Task offloading is a potential solution to satisfy the strict requirements of computation-intensive and latency-sensitive vehicular applications due to the limited onboard computing resources. However, the overwhelming upload traffic may lead to unacceptable uploading time. To tackle this issue, for tasks taking environmental data as input, the data perceived by roadside units (RSU) equipped with several sensors can be directly exploited for computation, resulting in a novel task offloading paradigm with integrated communications, sensing and computing (I-CSC). With this paradigm, vehicles can select to upload their sensed data to RSUs or transmit computing instructions to RSUs during the offloading. By optimizing the computation mode and network resources, in this paper, we investigate an I-CSC-based task offloading problem to reduce the cost caused by resource consumption while guaranteeing the latency of each task. Although this non-convex problem can be handled by the alternating minimization (AM) algorithm that alternatively minimizes the divided four sub-problems, it leads to high computational complexity and local optimal solution. To tackle this challenge, we propose a creative structural knowledge-driven meta-learning (SKDML) method, involving both the model-based AM algorithm and neural networks. Specifically, borrowing the iterative structure of the AM algorithm, also referred to as structural knowledge, the proposed SKDML adopts long short-term memory (LSTM) network-based meta-learning to learn an adaptive optimizer for updating variables in each sub-problem, instead of the handcrafted counterpart in the AM algorithm.
Training Latency Minimization for Model-Splitting Allowed Federated Edge Learning
Jul 21, 2023



To alleviate the shortage of computing power faced by clients in training deep neural networks (DNNs) using federated learning (FL), we leverage the edge computing and split learning to propose a model-splitting allowed FL (SFL) framework, with the aim to minimize the training latency without loss of test accuracy. Under the synchronized global update setting, the latency to complete a round of global training is determined by the maximum latency for the clients to complete a local training session. Therefore, the training latency minimization problem (TLMP) is modelled as a minimizing-maximum problem. To solve this mixed integer nonlinear programming problem, we first propose a regression method to fit the quantitative-relationship between the cut-layer and other parameters of an AI-model, and thus, transform the TLMP into a continuous problem. Considering that the two subproblems involved in the TLMP, namely, the cut-layer selection problem for the clients and the computing resource allocation problem for the parameter-server are relative independence, an alternate-optimization-based algorithm with polynomial time complexity is developed to obtain a high-quality solution to the TLMP. Extensive experiments are performed on a popular DNN-model EfficientNetV2 using dataset MNIST, and the results verify the validity and improved performance of the proposed SFL framework.
InTEn-LOAM: Intensity and Temporal Enhanced LiDAR Odometry and Mapping
Sep 13, 2022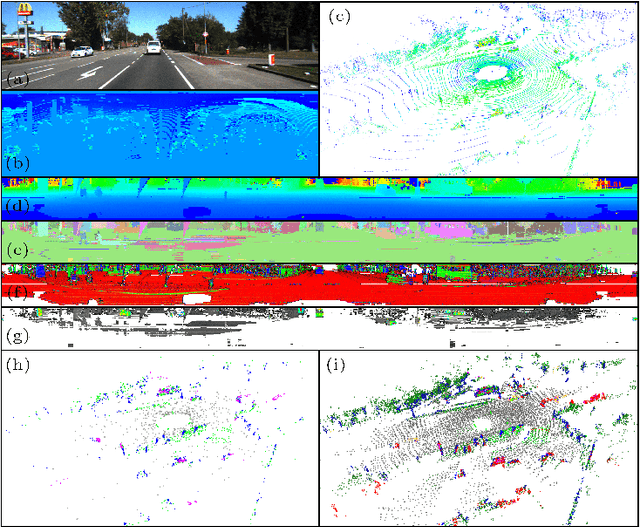
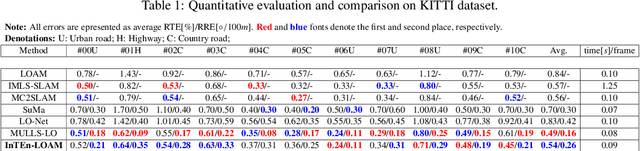
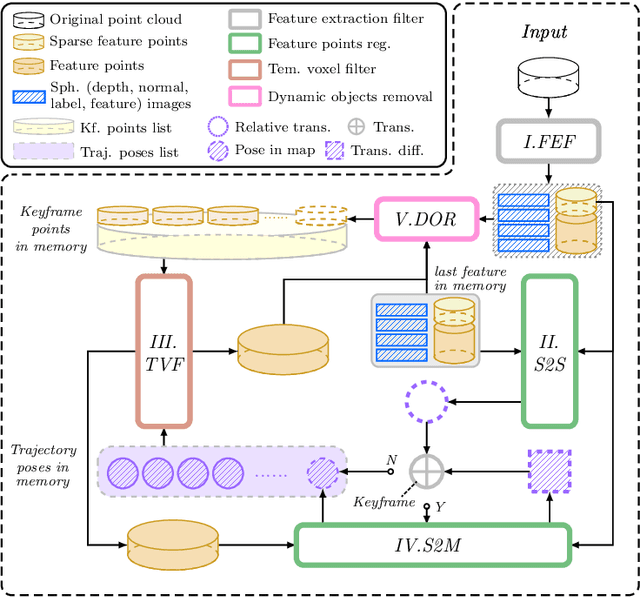

Traditional LiDAR odometry (LO) systems mainly leverage geometric information obtained from the traversed surroundings to register laser scans and estimate LiDAR ego-motion, while it may be unreliable in dynamic or unstructured environments. This paper proposes InTEn-LOAM, a low-drift and robust LiDAR odometry and mapping method that fully exploits implicit information of laser sweeps (i.e., geometric, intensity, and temporal characteristics). Scanned points are projected to cylindrical images, which facilitate the efficient and adaptive extraction of various types of features, i.e., ground, beam, facade, and reflector. We propose a novel intensity-based points registration algorithm and incorporate it into the LiDAR odometry, enabling the LO system to jointly estimate the LiDAR ego-motion using both geometric and intensity feature points. To eliminate the interference of dynamic objects, we propose a temporal-based dynamic object removal approach to filter them out before map update. Moreover, the local map is organized and downsampled using a temporal-related voxel grid filter to maintain the similarity between the current scan and the static local map. Extensive experiments are conducted on both simulated and real-world datasets. The results show that the proposed method achieves similar or better accuracy w.r.t the state-of-the-arts in normal driving scenarios and outperforms geometric-based LO in unstructured environments.