 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuromorphic Optical Flow and Real-time Implementation with Event Cameras
Apr 14, 2023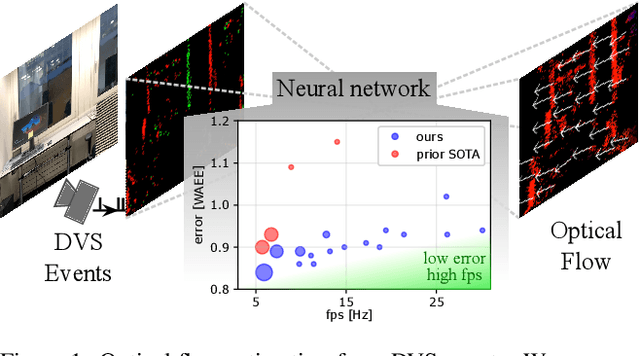
Optical flow provides information on relative motion that is an important component in many computer vision pipelines. Neural networks provide high accuracy optical flow, yet their complexity is often prohibitive for application at the edge or in robots, where efficiency and latency play crucial role. To address this challenge, we build on the latest developments in event-based vision and spiking neural networks. We propose a new network architecture, inspired by Timelens, that improves the state-of-the-art self-supervised optical flow accuracy when operated both in spiking and non-spiking mode. To implement a real-time pipeline with a physical event camera, we propose a methodology for principled model simplification based on activity and latency analysis. We demonstrate high speed optical flow prediction with almost two orders of magnitude reduced complexity while maintaining the accuracy, opening the path for real-time deployments.