 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEEvAct: Early Event-Based Action Recognition with High-Rate Two-Stream Spiking Neural Networks
Jul 10, 2025Recognizing human activities early is crucial for the safety and responsiveness of human-robot and human-machine interfaces. Due to their high temporal resolution and low latency, event-based vision sensors are a perfect match for this early recognition demand. However, most existing processing approaches accumulate events to low-rate frames or space-time voxels which limits the early prediction capabilities. In contrast, spiking neural networks (SNNs) can process the events at a high-rate for early predictions, but most works still fall short on final accuracy. In this work, we introduce a high-rate two-stream SNN which closes this gap by outperforming previous work by 2% in final accuracy on the large-scale THU EACT-50 dataset. We benchmark the SNNs within a novel early event-based recognition framework by reporting Top-1 and Top-5 recognition scores for growing observation time. Finally, we exemplify the impact of these methods on a real-world task of early action triggering for human motion capture in sports.
Scaling Up Resonate-and-Fire Networks for Fast Deep Learning
Apr 01, 2025Spiking neural networks (SNNs) present a promising computing paradigm for neuromorphic processing of event-based sensor data. The resonate-and-fire (RF) neuron, in particular, appeals through its biological plausibility, complex dynamics, yet computational simplicity. Despite theoretically predicted benefits, challenges in parameter initialization and efficient learning inhibited the implementation of RF networks, constraining their use to a single layer. In this paper, we address these shortcomings by deriving the RF neuron as a structured state space model (SSM) from the HiPPO framework. We introduce S5-RF, a new SSM layer comprised of RF neurons based on the S5 model, that features a generic initialization scheme and fast training within a deep architecture. S5-RF scales for the first time a RF network to a deep SNN with up to four layers and achieves with 78.8% a new state-of-the-art result for recurrent SNNs on the Spiking Speech Commands dataset in under three hours of training time. Moreover, compared to the reference SNNs that solve our benchmarking tasks, it achieves similar performance with much fewer spiking operations. Our code is publicly available at https://github.com/ThomasEHuber/s5-rf.
* 19 pages, 3 figures
Neuromorphic Optical Flow and Real-time Implementation with Event Cameras
Apr 14, 2023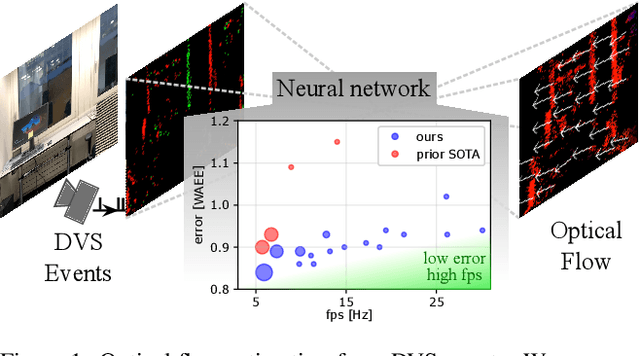
Optical flow provides information on relative motion that is an important component in many computer vision pipelines. Neural networks provide high accuracy optical flow, yet their complexity is often prohibitive for application at the edge or in robots, where efficiency and latency play crucial role. To address this challenge, we build on the latest developments in event-based vision and spiking neural networks. We propose a new network architecture, inspired by Timelens, that improves the state-of-the-art self-supervised optical flow accuracy when operated both in spiking and non-spiking mode. To implement a real-time pipeline with a physical event camera, we propose a methodology for principled model simplification based on activity and latency analysis. We demonstrate high speed optical flow prediction with almost two orders of magnitude reduced complexity while maintaining the accuracy, opening the path for real-time deployments.
Dynamic Event-based Optical Identification and Communication
Mar 14, 2023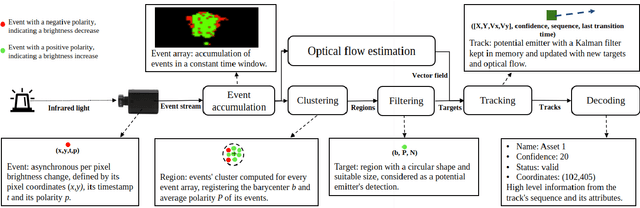

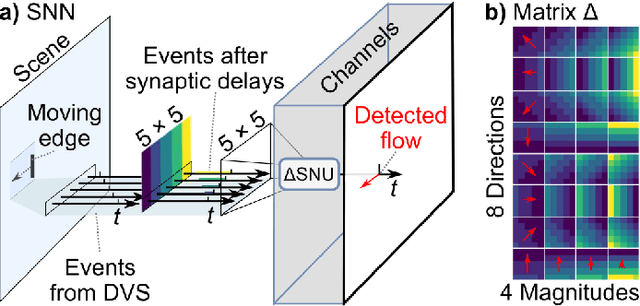
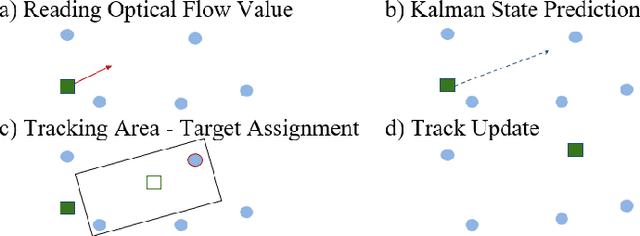
Optical identification is often done with spatial or temporal visual pattern recognition and localization. Temporal pattern recognition, depending on the technology, involves a trade-off between communication frequency, range and accurate tracking. We propose a solution with light-emitting beacons that improves this trade-off by exploiting fast event-based cameras and, for tracking, sparse neuromorphic optical flow computed with spiking neurons. In an asset monitoring use case, we demonstrate that the system, embedded in a simulated drone, is robust to relative movements and enables simultaneous communication with, and tracking of, multiple moving beacons. Finally, in a hardware lab prototype, we achieve state-of-the-art optical camera communication frequencies in the kHz magnitude.