 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynergy over Discrepancy: A Partition-Based Approach to Multi-Domain LLM Fine-Tuning
Nov 11, 2025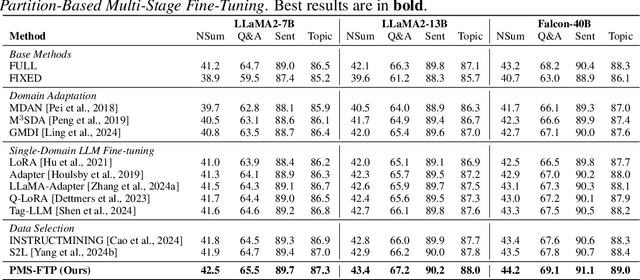
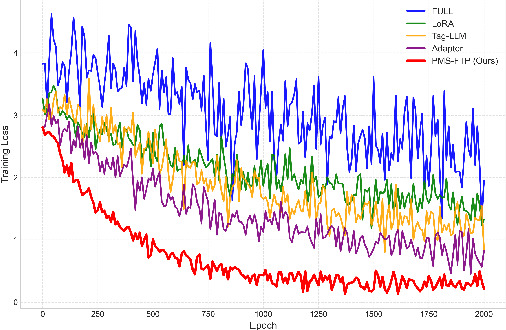
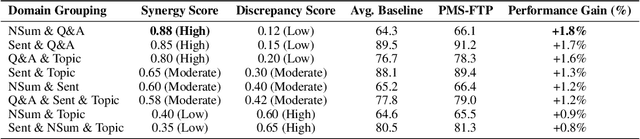
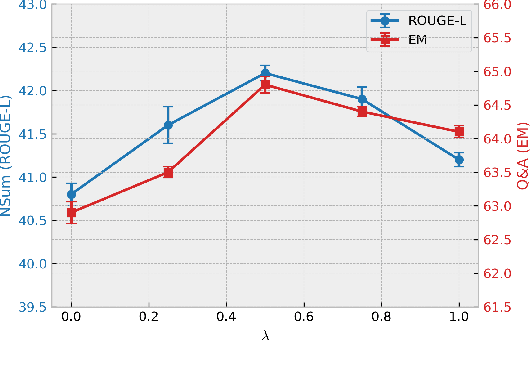
Large language models (LLMs) demonstrate impressive generalization abilities, yet adapting them effectively across multiple heterogeneous domains remains challenging due to inter-domain interference. To overcome this challenge, we propose a partition-based multi-stage fine-tuning framework designed to exploit inter-domain synergies while minimizing negative transfer. Our approach strategically partitions domains into subsets (stages) by balancing domain discrepancy, synergy, and model capacity constraints. We theoretically analyze the proposed framework and derive novel generalization bounds that justify our partitioning strategy. Extensive empirical evaluations on various language understanding tasks show that our method consistently outperforms state-of-the-art baselines.
Anti-Degeneracy Scheme for Lidar SLAM based on Particle Filter in Geometry Feature-Less Environments
Feb 17, 2025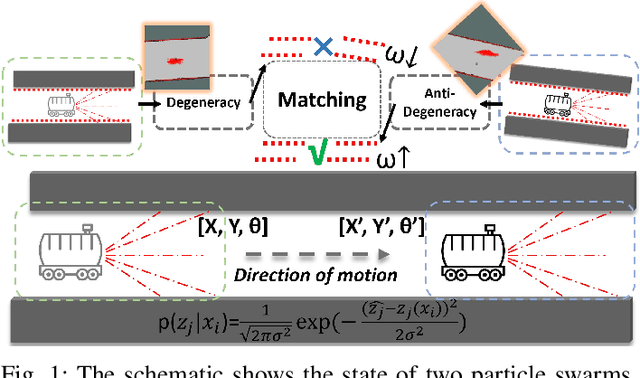
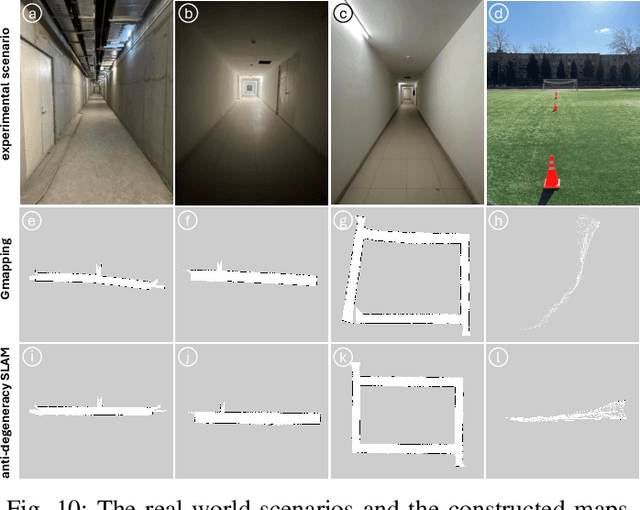
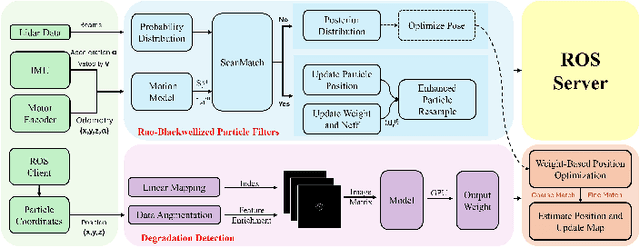
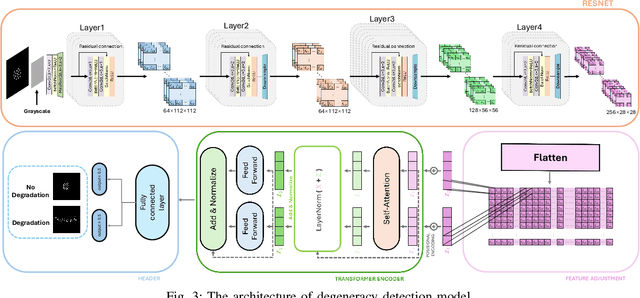
Simultaneous localization and mapping (SLAM) based on particle filtering has been extensively employed in indoor scenarios due to its high efficiency. However, in geometry feature-less scenes, the accuracy is severely reduced due to lack of constraints. In this article, we propose an anti-degeneracy system based on deep learning. Firstly, we design a scale-invariant linear mapping to convert coordinates in continuous space into discrete indexes, in which a data augmentation method based on Gaussian model is proposed to ensure the model performance by effectively mitigating the impact of changes in the number of particles on the feature distribution. Secondly, we develop a degeneracy detection model using residual neural networks (ResNet) and transformer which is able to identify degeneracy by scrutinizing the distribution of the particle population. Thirdly, an adaptive anti-degeneracy strategy is designed, which first performs fusion and perturbation on the resample process to provide rich and accurate initial values for the pose optimization, and use a hierarchical pose optimization combining coarse and fine matching, which is able to adaptively adjust the optimization frequency and the sensor trustworthiness according to the degree of degeneracy, in order to enhance the ability of searching the global optimal pose. Finally, we demonstrate the optimality of the model, as well as the improvement of the image matrix method and GPU on the computation time through ablation experiments, and verify the performance of the anti-degeneracy system in different scenarios through simulation experiments and real experiments. This work has been submitted to IEEE for publication. Copyright may be transferred without notice, after which this version may no longer be available.
Adaptive Hierarchical Origami Metastructures
Nov 29, 2023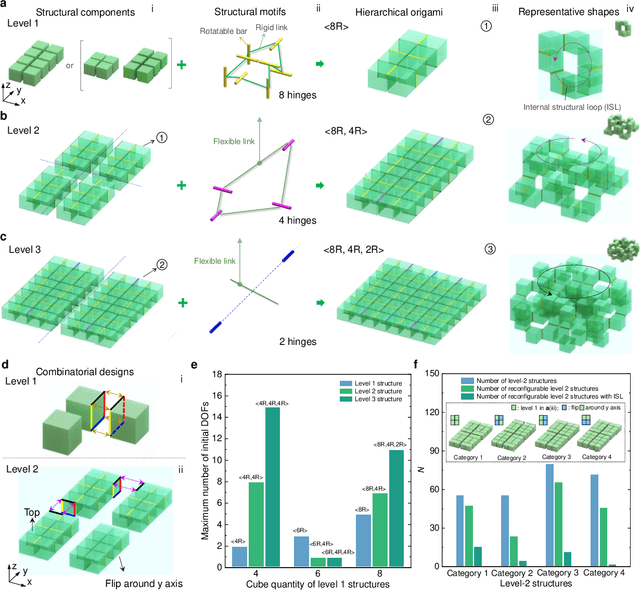
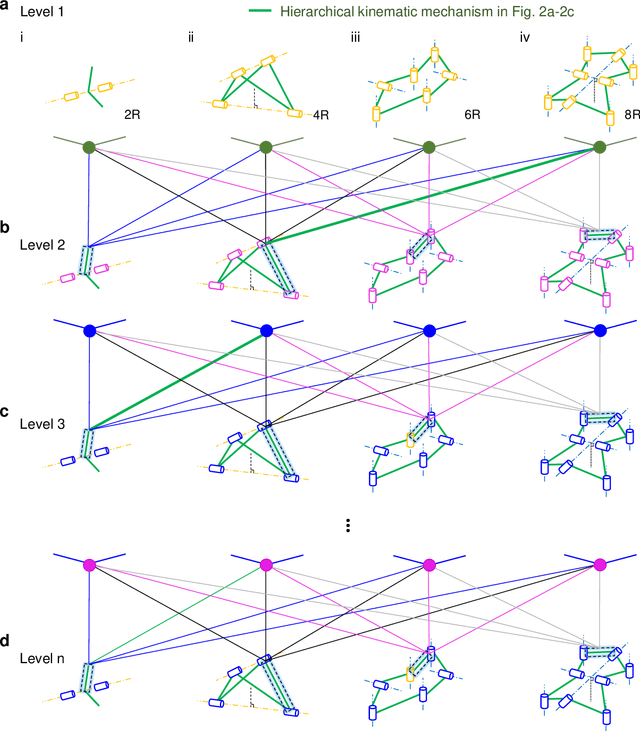
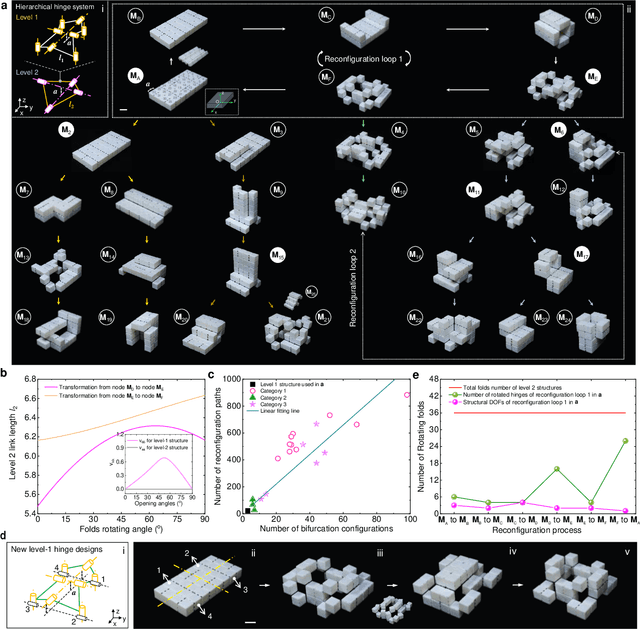
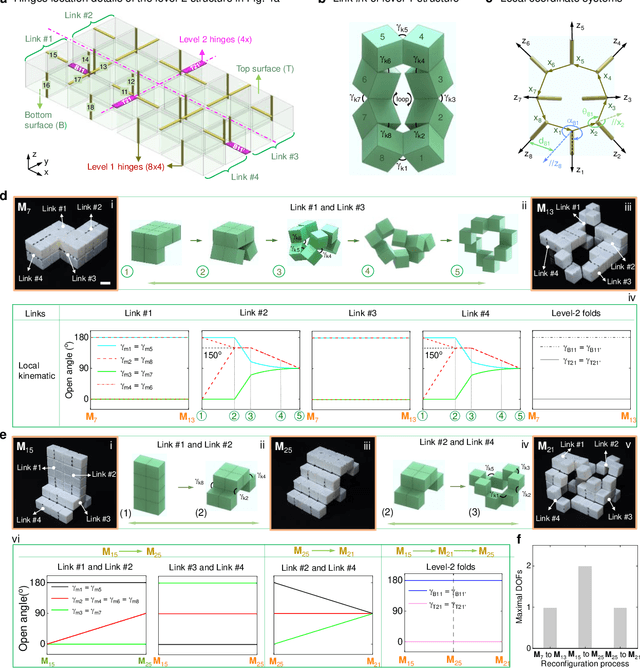
Shape-morphing capabilities are crucial for enabling multifunctionality in both biological and artificial systems. Various strategies for shape morphing have been proposed for applications in metamaterials and robotics. However, few of these approaches have achieved the ability to seamlessly transform into a multitude of volumetric shapes post-fabrication using a relatively simple actuation and control mechanism. Taking inspiration from thick origami and hierarchies in nature, we present a new hierarchical construction method based on polyhedrons to create an extensive library of compact origami metastructures. We show that a single hierarchical origami structure can autonomously adapt to over 103 versatile architectural configurations, achieved with the utilization of fewer than 3 actuation degrees of freedom and employing simple transition kinematics. We uncover the fundamental principles governing theses shape transformation through theoretical models. Furthermore, we also demonstrate the wide-ranging potential applications of these transformable hierarchical structures. These include their uses as untethered and autonomous robotic transformers capable of various gait-shifting and multidirectional locomotion, as well as rapidly self-deployable and self-reconfigurable architecture, exemplifying its scalability up to the meter scale. Lastly, we introduce the concept of multitask reconfigurable and deployable space robots and habitats, showcasing the adaptability and versatility of these metastructures.