 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Hierarchical Origami Metastructures
Nov 29, 2023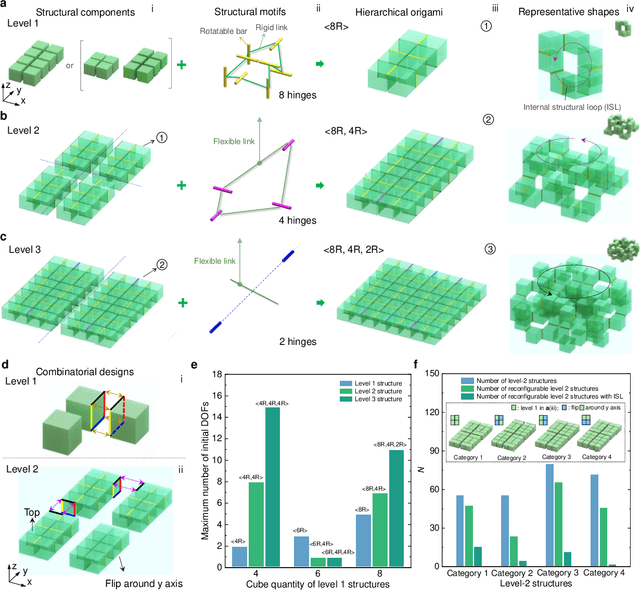
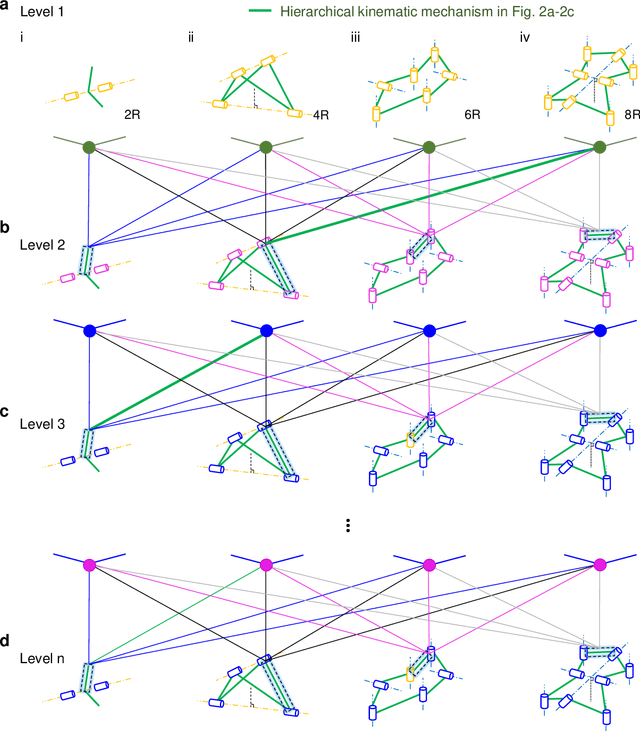
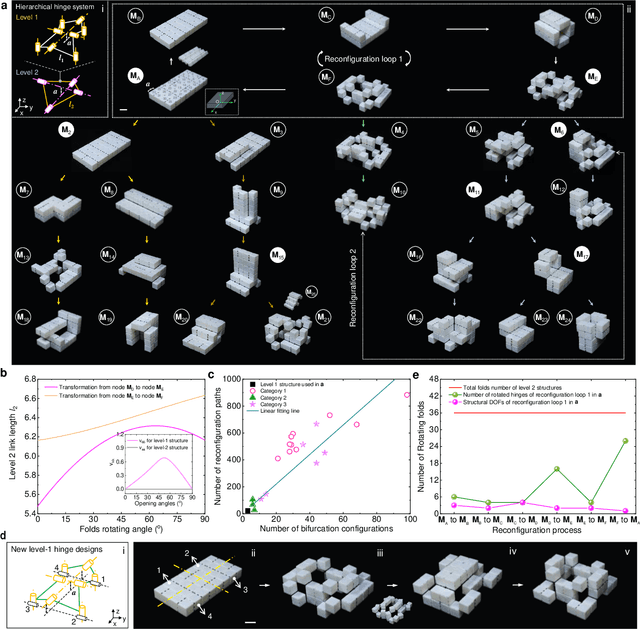
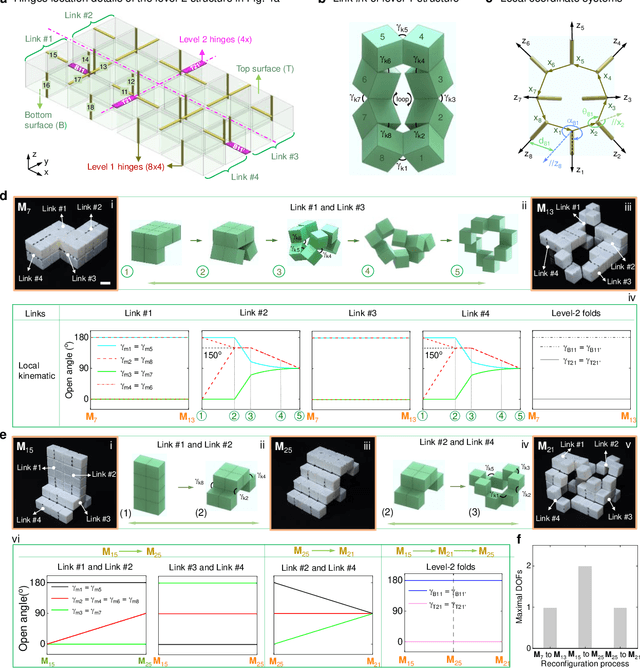
Shape-morphing capabilities are crucial for enabling multifunctionality in both biological and artificial systems. Various strategies for shape morphing have been proposed for applications in metamaterials and robotics. However, few of these approaches have achieved the ability to seamlessly transform into a multitude of volumetric shapes post-fabrication using a relatively simple actuation and control mechanism. Taking inspiration from thick origami and hierarchies in nature, we present a new hierarchical construction method based on polyhedrons to create an extensive library of compact origami metastructures. We show that a single hierarchical origami structure can autonomously adapt to over 103 versatile architectural configurations, achieved with the utilization of fewer than 3 actuation degrees of freedom and employing simple transition kinematics. We uncover the fundamental principles governing theses shape transformation through theoretical models. Furthermore, we also demonstrate the wide-ranging potential applications of these transformable hierarchical structures. These include their uses as untethered and autonomous robotic transformers capable of various gait-shifting and multidirectional locomotion, as well as rapidly self-deployable and self-reconfigurable architecture, exemplifying its scalability up to the meter scale. Lastly, we introduce the concept of multitask reconfigurable and deployable space robots and habitats, showcasing the adaptability and versatility of these metastructures.
Medical Robots for Infectious Diseases: Lessons and Challenges from the COVID-19 Pandemic
Dec 14, 2020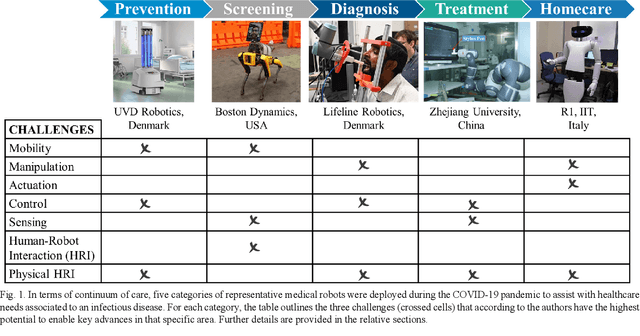
Medical robots can play an important role in mitigating the spread of infectious diseases and delivering quality care to patients during the COVID-19 pandemic. Methods and procedures involving medical robots in the continuum of care, ranging from disease prevention, screening, diagnosis, treatment, and homecare have been extensively deployed and also present incredible opportunities for future development. This paper provides an overview of the current state-of-the-art, highlighting the enabling technologies and unmet needs for prospective technological advances within the next 5-10 years. We also identify key research and knowledge barriers that need to be addressed in developing effective and flexible solutions to ensure preparedness for rapid and scalable deployment to combat infectious diseases.