 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnti-Degeneracy Scheme for Lidar SLAM based on Particle Filter in Geometry Feature-Less Environments
Feb 17, 2025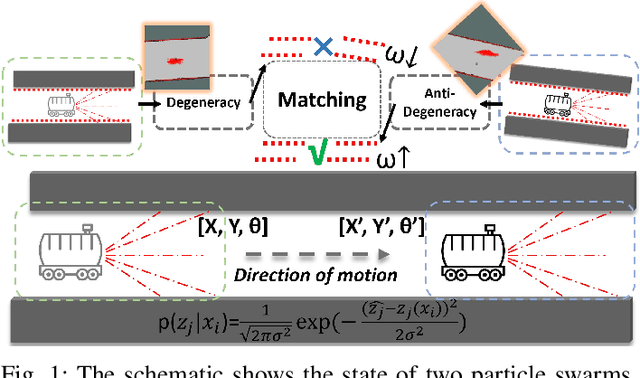
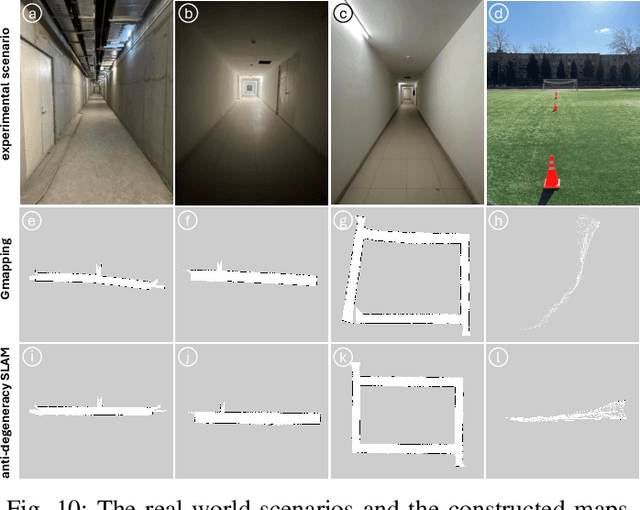
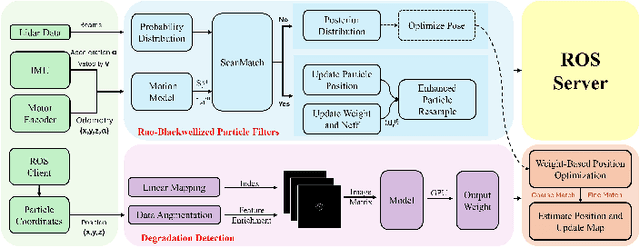
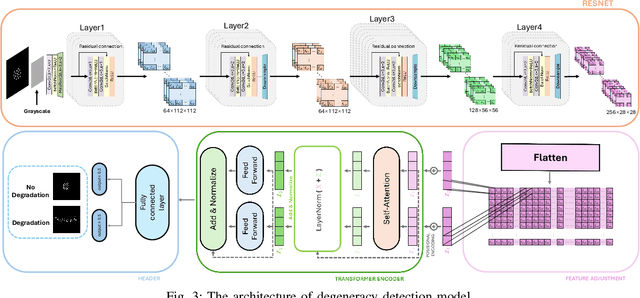
Simultaneous localization and mapping (SLAM) based on particle filtering has been extensively employed in indoor scenarios due to its high efficiency. However, in geometry feature-less scenes, the accuracy is severely reduced due to lack of constraints. In this article, we propose an anti-degeneracy system based on deep learning. Firstly, we design a scale-invariant linear mapping to convert coordinates in continuous space into discrete indexes, in which a data augmentation method based on Gaussian model is proposed to ensure the model performance by effectively mitigating the impact of changes in the number of particles on the feature distribution. Secondly, we develop a degeneracy detection model using residual neural networks (ResNet) and transformer which is able to identify degeneracy by scrutinizing the distribution of the particle population. Thirdly, an adaptive anti-degeneracy strategy is designed, which first performs fusion and perturbation on the resample process to provide rich and accurate initial values for the pose optimization, and use a hierarchical pose optimization combining coarse and fine matching, which is able to adaptively adjust the optimization frequency and the sensor trustworthiness according to the degree of degeneracy, in order to enhance the ability of searching the global optimal pose. Finally, we demonstrate the optimality of the model, as well as the improvement of the image matrix method and GPU on the computation time through ablation experiments, and verify the performance of the anti-degeneracy system in different scenarios through simulation experiments and real experiments. This work has been submitted to IEEE for publication. Copyright may be transferred without notice, after which this version may no longer be available.