 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven Transferred Energy Management Strategy for Hybrid Electric Vehicles via Deep Reinforcement Learning
Sep 20, 2020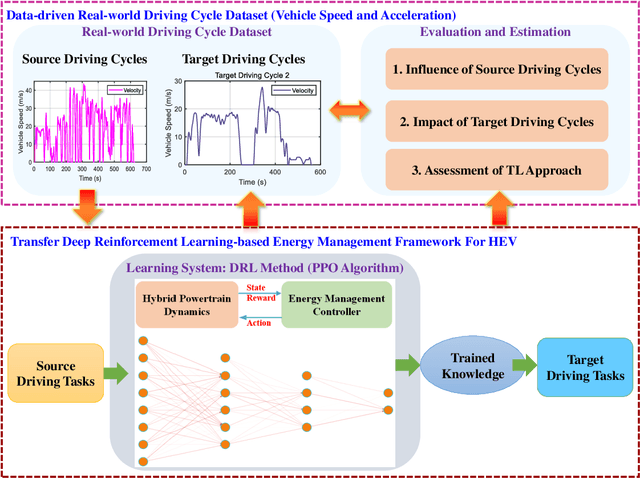
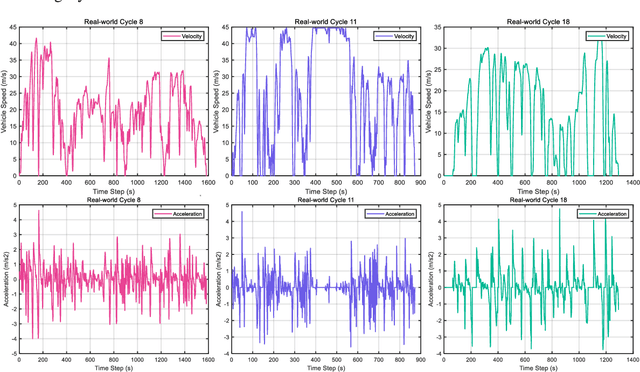
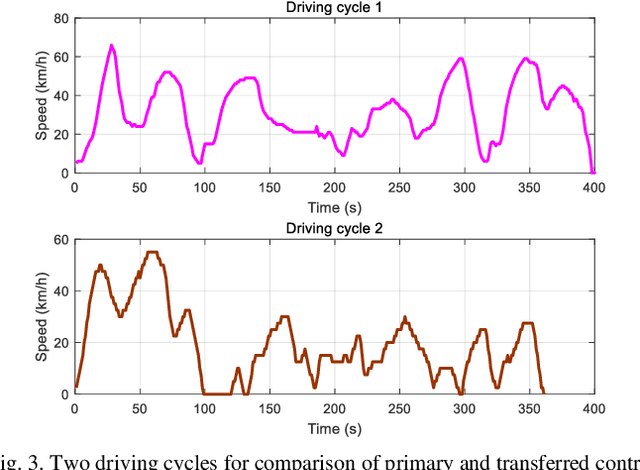
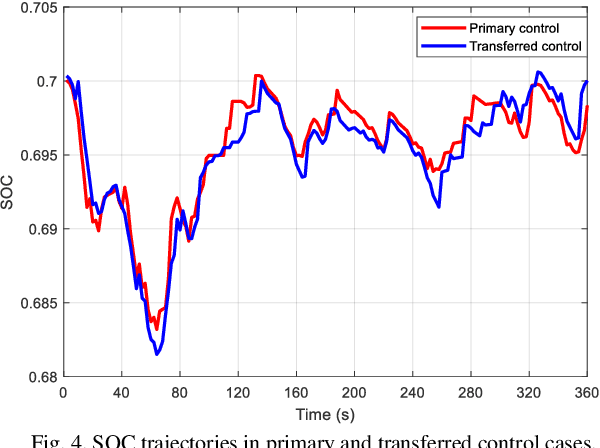
Real-time applications of energy management strategies (EMSs) in hybrid electric vehicles (HEVs) are the harshest requirements for researchers and engineers. Inspired by the excellent problem-solving capabilities of deep reinforcement learning (DRL), this paper proposes a real-time EMS via incorporating the DRL method and transfer learning (TL). The related EMSs are derived from and evaluated on the real-world collected driving cycle dataset from Transportation Secure Data Center (TSDC). The concrete DRL algorithm is proximal policy optimization (PPO) belonging to the policy gradient (PG) techniques. For specification, many source driving cycles are utilized for training the parameters of deep network based on PPO. The learned parameters are transformed into the target driving cycles under the TL framework. The EMSs related to the target driving cycles are estimated and compared in different training conditions. Simulation results indicate that the presented transfer DRL-based EMS could effectively reduce time consumption and guarantee control performance.
Reinforcement Learning-Enabled Decision-Making Strategies for a Vehicle-Cyber-Physical-System in Connected Environment
Jul 16, 2020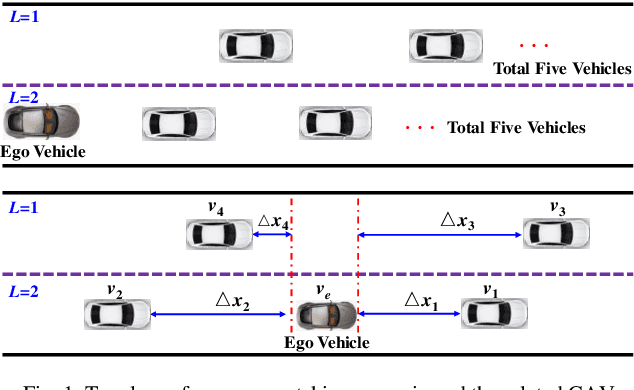


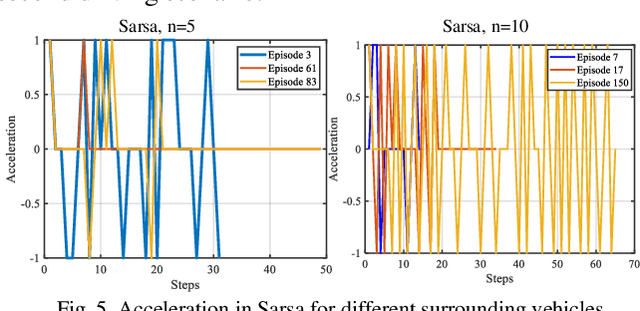
As a typical vehicle-cyber-physical-system (V-CPS), connected automated vehicles attracted more and more attention in recent years. This paper focuses on discussing the decision-making (DM) strategy for autonomous vehicles in a connected environment. First, the highway DM problem is formulated, wherein the vehicles can exchange information via wireless networking. Then, two classical reinforcement learning (RL) algorithms, Q-learning and Dyna, are leveraged to derive the DM strategies in a predefined driving scenario. Finally, the control performance of the derived DM policies in safety and efficiency is analyzed. Furthermore, the inherent differences of the RL algorithms are embodied and discussed in DM strategies.
Transferred Energy Management Strategies for Hybrid Electric Vehicles Based on Driving Conditions Recognition
Jul 16, 2020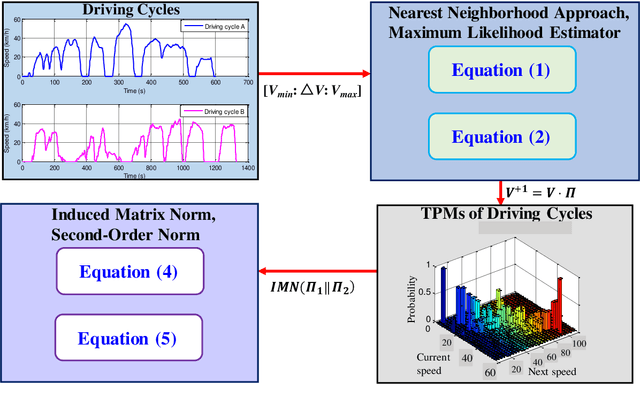
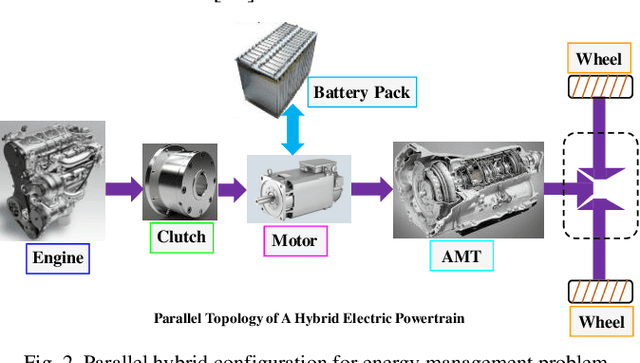
Energy management strategies (EMSs) are the most significant components in hybrid electric vehicles (HEVs) because they decide the potential of energy conservation and emission reduction. This work presents a transferred EMS for a parallel HEV via combining the reinforcement learning method and driving conditions recognition. First, the Markov decision process (MDP) and the transition probability matrix are utilized to differentiate the driving conditions. Then, reinforcement learning algorithms are formulated to achieve power split controls, in which Q-tables are tuned by current driving situations. Finally, the proposed transferred framework is estimated and validated in a parallel hybrid topology. Its advantages in computational efficiency and fuel economy are summarized and proved.