 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvancing a taxonomy for proxemics in robot social navigation
Mar 19, 2025



Deploying robots in human environments requires effective social robot navigation. This article focuses on proxemics, proposing a new taxonomy and suggesting future directions through an analysis of state-of-the-art studies and the identification of research gaps. The various factors that affect the dynamic properties of proxemics patterns in human-robot interaction are thoroughly explored. To establish a coherent proxemics framework, we identified and organized the key parameters and attributes that shape proxemics behavior. Building on this framework, we introduce a novel approach to define proxemics in robot navigation, emphasizing the significant attributes that influence its structure and size. This leads to the development of a new taxonomy that serves as a foundation for guiding future research and development. Our findings underscore the complexity of defining personal distance, revealing it as a complex, multi-dimensional challenge. Furthermore, we highlight the flexible and dynamic nature of personal zone boundaries, which should be adaptable to different contexts and circumstances. Additionally, we propose a new layer for implementing proxemics in the navigation of social robots.
Improving robot understanding using conversational AI: demonstration and feasibility study
Jan 21, 2025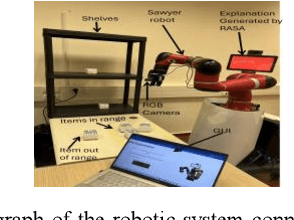
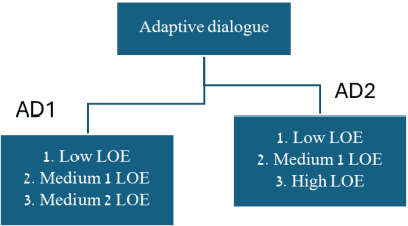
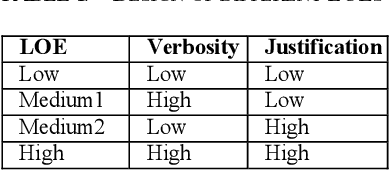
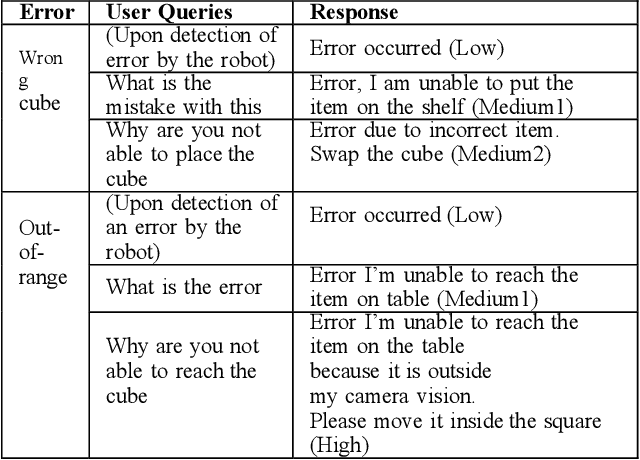
Explanations constitute an important aspect of successful human robot interactions and can enhance robot understanding. To improve the understanding of the robot, we have developed four levels of explanation (LOE) based on two questions: what needs to be explained, and why the robot has made a particular decision. The understandable robot requires a communicative action when there is disparity between the human s mental model of the robot and the robots state of mind. This communicative action was generated by utilizing a conversational AI platform to generate explanations. An adaptive dialog was implemented for transition from one LOE to another. Here, we demonstrate the adaptive dialog in a collaborative task with errors and provide results of a feasibility study with users.
Levels of explanation -- implementation and evaluation of what and when for different time-sensitive tasks
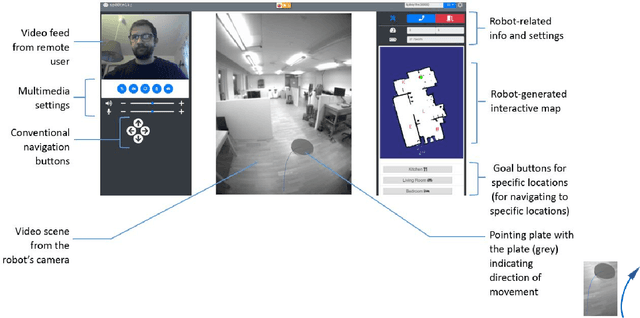
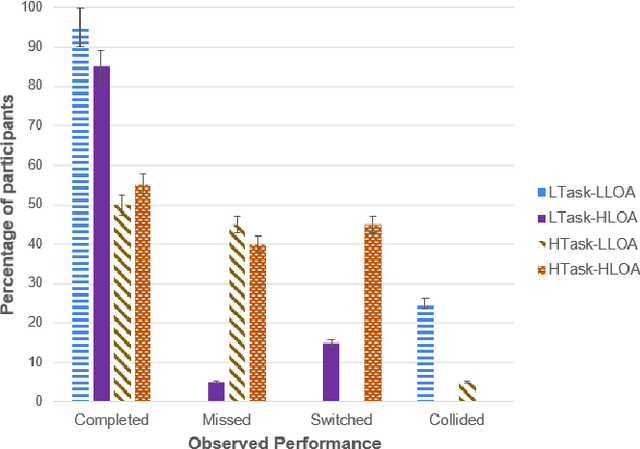
Oct 30, 2024In this work, we focused on constructing and evaluating levels of explanation(LOE) that address two basic aspect of HRI: 1. What information should be communicated to the user by the robot? 2. When should the robot communicate this information? For constructing the LOE, we defined two terms, verbosity and explanation patterns, each with two levels (verbosity -- high and low, explanation patterns -- dynamic and static). Based on these parameters, three different LOE (high, medium, and low) were constructed and evaluated in a user study with a telepresence robot. The user study was conducted for a simulated telerobotic healthcare task with two different conditions related to time sensitivity, as evaluated by two different user groups -- one that performed the task within a time limit and the other with no time limit. We found that the high LOE was preferred in terms of adequacy of explanation, number of collisions, number of incorrect movements, and number of clarifications when users performed the experiment in the without time limit condition. We also found that both high and medium LOE did not have significant differences in completion time, the fluency of HRI, and trust in the robot. When users performed the experiment in the with time limit condition, high and medium LOE had better task performances and were preferred to the low LOE in terms of completion time, fluency, adequacy of explanation, trust, number of collisions, number of incorrect movements and number of clarifications. Future directions for advancing LOE are discussed.
Can Robotic Experimenters help improve HRI Experiments? An Experimental Study
Nov 24, 2023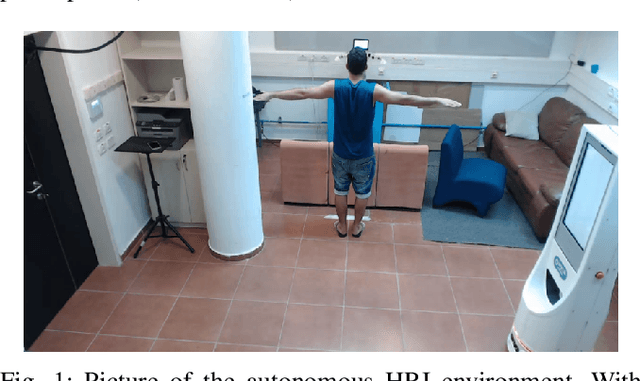
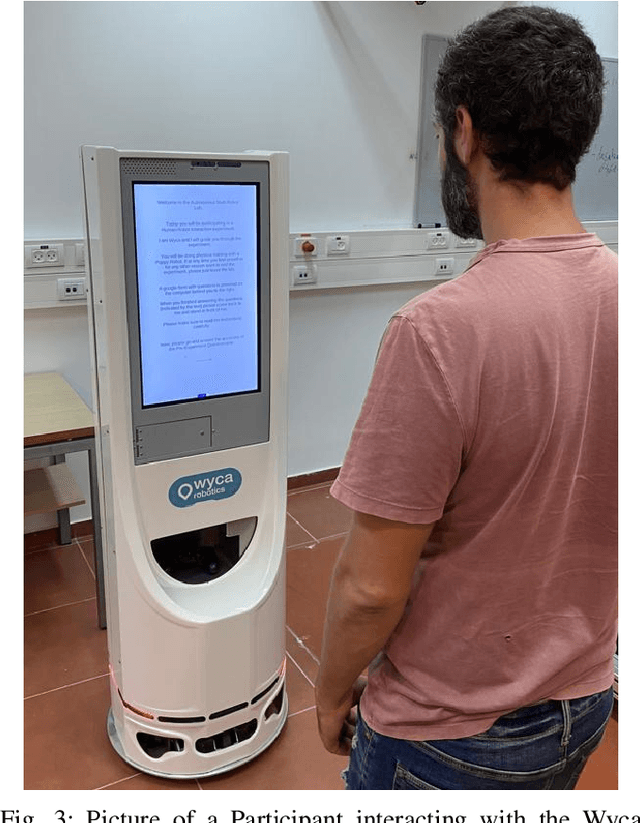
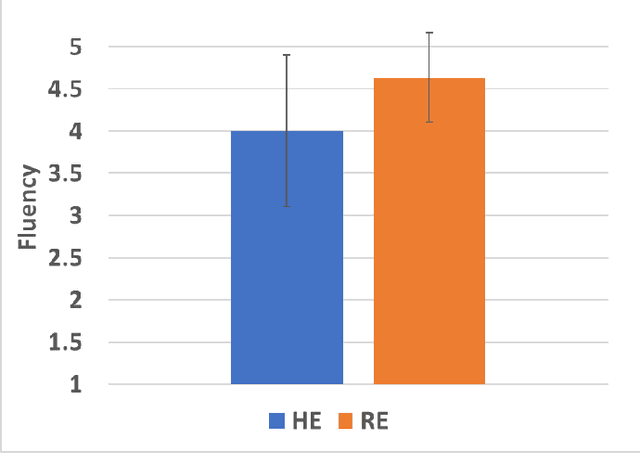
To evaluate the design and skills of a robot or an algorithm for robotics, human-robot interaction user studies need to be performed. Classically, these studies are conducted by human experimenters, requiring considerable effort, and introducing variability and potential human error. In this paper, we investigate the use of robots in support of HRI experiments. Robots can perform repeated tasks accurately, thereby reducing human effort and improving validity through reduction of error and variability between participants. To assess the potential for robot led HRI experiments, we ran an HRI experiment with two participant groups, one led by a human experimenter and another led mostly by a robot experimenter.We show that the replacement of several repetitive experiment tasks through robots is not only possible but beneficial: Trials performed by the robot experimenter had fewer errors and were more fluent. There was no statistically significant difference in participants' perception w.r.t. cognitive load, comfortability, enjoyment, safety, trust and understandability between both groups. To the best of our knowledge, this is the first comparison between robot-led and human-led HRI experiments. It suggests that using robot experimenters can be beneficial and should be considered.
Optometrist's Algorithm for Personalizing Robot-Human Handovers
Aug 29, 2023

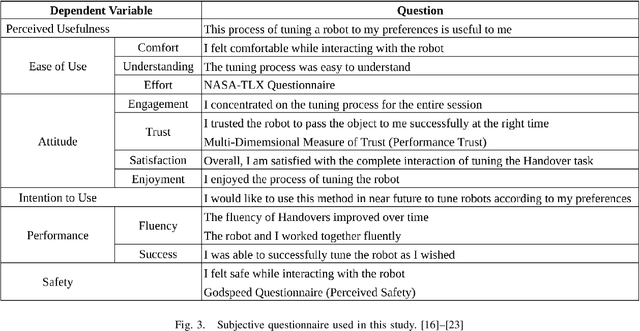

With an increasing interest in human-robot collaboration, there is a need to develop robot behavior while keeping the human user's preferences in mind. Highly skilled human users doing delicate tasks require their robot partners to behave according to their work habits and task constraints. To achieve this, we present the use of the Optometrist's Algorithm (OA) to interactively and intuitively personalize robot-human handovers. Using this algorithm, we tune controller parameters for speed, location, and effort. We study the differences in the fluency of the handovers before and after tuning and the subjective perception of this process in a study of $N=30$ non-expert users of mixed background -- evaluating the OA. The users evaluate the interaction on trust, safety, and workload scales, amongst other measures. They assess our tuning process to be engaging and easy to use. Personalization leads to an increase in the fluency of the interaction. Our participants utilize the wide range of parameters ending up with their unique personalized handover.
Mobile robots sampling algorithms for monitoring of insects populations in agricultural fields
Aug 26, 2023
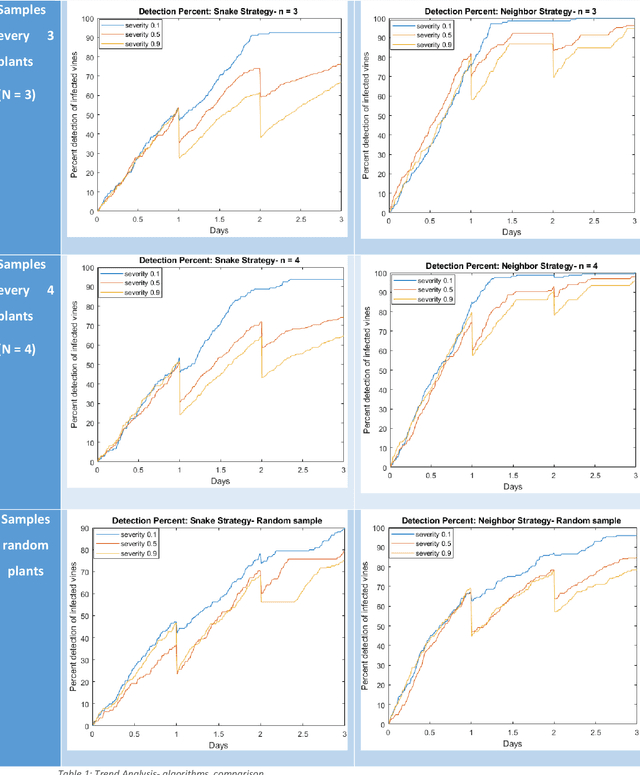
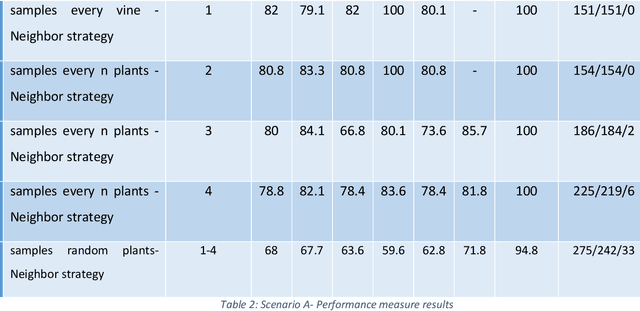
Plant diseases are major causes of production losses and may have a significant impact on the agricultural sector. Detecting pests as early as possible can help increase crop yields and production efficiency. Several robotic monitoring systems have been developed allowing to collect data and provide a greater understanding of environmental processes. An agricultural robot can enable accurate timely detection of pests, by traversing the field autonomously and monitoring the entire cropped area within a field. However, in many cases it is impossible to sample all plants due to resource limitations. In this thesis, the development and evaluation of several sampling algorithms are presented to address the challenge of an agriculture-monitoring ground robot designed to locate insects in an agricultural field, where complete sampling of all the plants is infeasible. Two situations were investigated in simulation models that were specially developed as part of this thesis: where no a-priori information on the insects is available and where prior information on the insects distributions within the field is known. For the first situation, seven algorithms were tested, each utilizing an approach to sample the field without prior knowledge of it. For the second situation, we present the development and evaluation of a dynamic sampling algorithm which utilizes real-time information to prioritize sampling at suspected points, locate hot spots and adapt sampling plans accordingly. The algorithm's performance was compared to two existing algorithms using Tetranychidae insect data from previous research. Analyses revealed that the dynamic algorithm outperformed the others.
Deep-Learning-based Counting Methods, Datasets, and Applications in Agriculture -- A Review
Mar 05, 2023The number of objects is considered an important factor in a variety of tasks in the agricultural domain. Automated counting can improve farmers decisions regarding yield estimation, stress detection, disease prevention, and more. In recent years, deep learning has been increasingly applied to many agriculture-related applications, complementing conventional computer-vision algorithms for counting agricultural objects. This article reviews progress in the past decade and the state of the art for counting methods in agriculture, focusing on deep-learning methods. It presents an overview of counting algorithms, metrics, platforms, and sensors, a list of all publicly available datasets, and an in-depth discussion of various deep-learning methods used for counting. Finally, it discusses open challenges in object counting using deep learning and gives a glimpse into new directions and future perspectives for counting research. The review reveals a major leap forward in object counting in agriculture in the past decade, led by the penetration of deep learning methods into counting platforms.
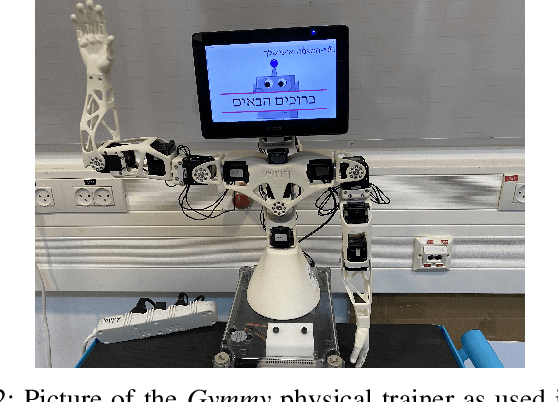
Older adults acceptance of SARs: The link between anticipated and actual interaction
Sep 04, 2022This study demonstrates how anticipated and actual interactions shape the QE of SARs among older adults. The study consisted of two parts: an online survey to explore the anticipated interaction through video viewing of a SAR and an acceptance study where older adults interacted with the robot. Both parts of this study were completed with the assistance of Gymmy, a robotic system that our lab developed for training older adults in physical and cognitive activities. Both study parts exhibited similar user responses, indicating that users acceptance of SARs can be predicted by their anticipated interaction. Index Terms: Aging, human-robot interaction, older adults, quality evaluation, socially assistive robots, technology acceptance, technophobia, trust, user experience.
Robotic Exercise Trainer: How Failures and T-HRI Levels Affect User Acceptance and Trust
Sep 04, 2022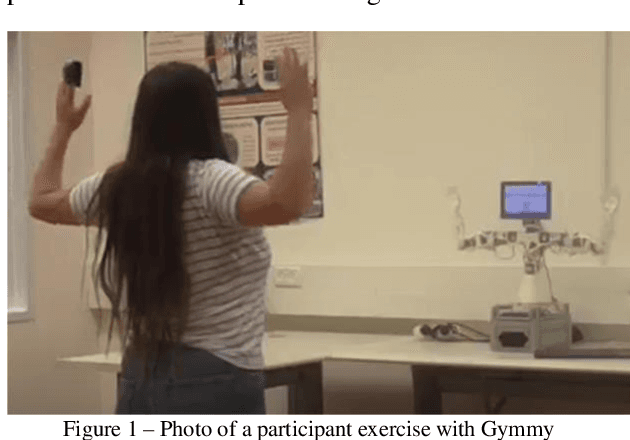
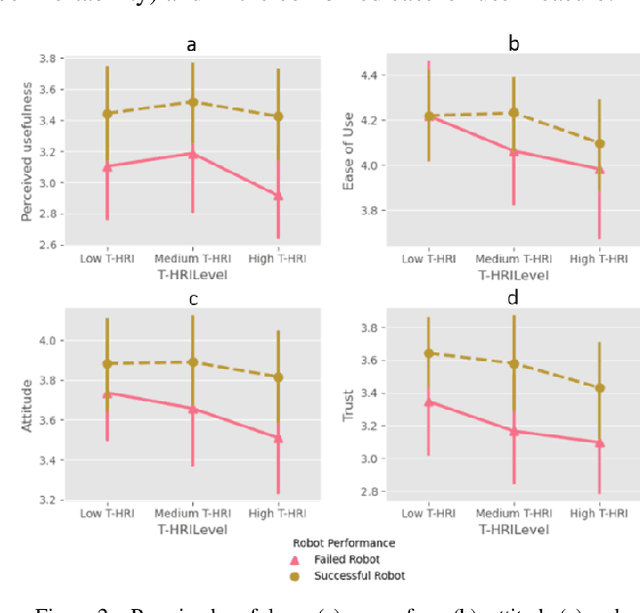
Physical activity is important for health and wellbeing, but only few fulfill the World Health Organization's criteria for physical activity. The development of a robotic exercise trainer can assist in increasing training accessibility and motivation. The acceptance and trust of users are crucial for the successful implementation of such an assistive robot. This can be affected by the transparency of the robotic system and the robot's performance, specifically, its failures. The study presents an initial investigation into the transparency levels as related to the task, human, robot, and interaction (T-HRI), with robot behavior adjusted accordingly. A failure in robot performance during part of the experiments allowed to analyze the effect of the T-HRI levels as related to failures. Participants who experienced failure in the robot's performance demonstrated a lower level of acceptance and trust than those who did not experience this failure. In addition, there were differences in acceptance measures between T-HRI levels and participant groups, suggesting several directions for future research.
Levels of Automation for a Mobile Robot Teleoperated by a Caregiver
Jul 21, 2021
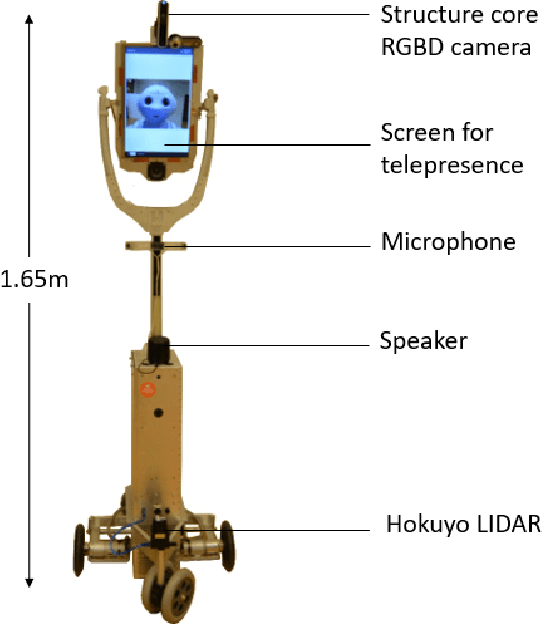
Caregivers in eldercare can benefit from telepresence robots that allow them to perform a variety of tasks remotely. In order for such robots to be operated effectively and efficiently by non-technical users, it is important to examine if and how the robotic system's level of automation (LOA) impacts their performance. The objective of this work was to develop suitable LOA modes for a mobile robotic telepresence (MRP) system for eldercare and assess their influence on users' performance, workload, awareness of the environment and usability at two different levels of task complexity. For this purpose, two LOA modes were implemented on the MRP platform: assisted teleoperation (low LOA mode) and autonomous navigation (high LOA mode). The system was evaluated in a user study with 20 participants, who, in the role of the caregiver, navigated the robot through a home-like environment to perform various control and perception tasks. Results revealed that performance improved at high LOA when the task complexity was low. However, when task complexity increased, lower LOA improved performance. This opposite trend was also observed in the results for workload and situation awareness. We discuss the results in terms of the LOAs' impact on users' attitude towards automation and implications on usability.