 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLevels of Automation for a Mobile Robot Teleoperated by a Caregiver
Jul 21, 2021
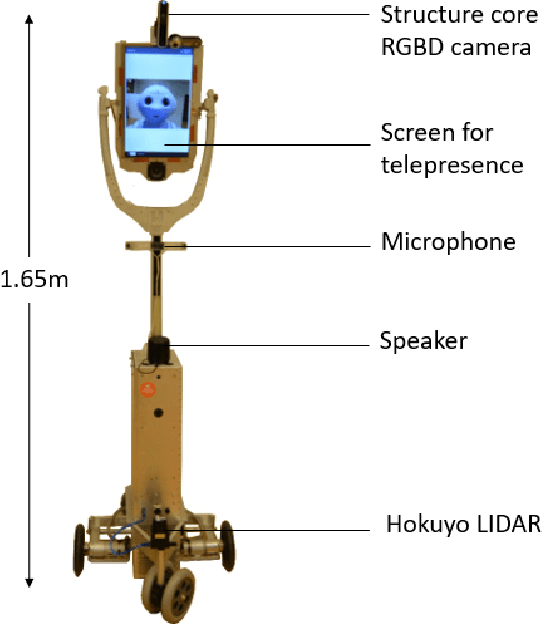
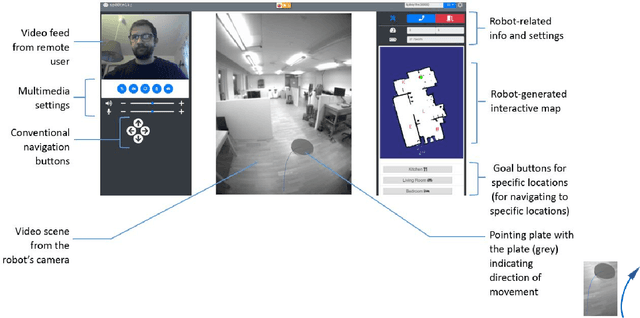
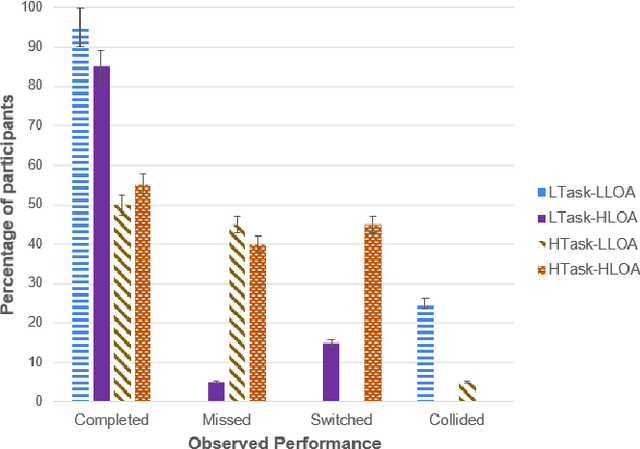
Caregivers in eldercare can benefit from telepresence robots that allow them to perform a variety of tasks remotely. In order for such robots to be operated effectively and efficiently by non-technical users, it is important to examine if and how the robotic system's level of automation (LOA) impacts their performance. The objective of this work was to develop suitable LOA modes for a mobile robotic telepresence (MRP) system for eldercare and assess their influence on users' performance, workload, awareness of the environment and usability at two different levels of task complexity. For this purpose, two LOA modes were implemented on the MRP platform: assisted teleoperation (low LOA mode) and autonomous navigation (high LOA mode). The system was evaluated in a user study with 20 participants, who, in the role of the caregiver, navigated the robot through a home-like environment to perform various control and perception tasks. Results revealed that performance improved at high LOA when the task complexity was low. However, when task complexity increased, lower LOA improved performance. This opposite trend was also observed in the results for workload and situation awareness. We discuss the results in terms of the LOAs' impact on users' attitude towards automation and implications on usability.
An Open-Source Modular Robotic System for Telepresence and Remote Disinfection
Feb 02, 2021
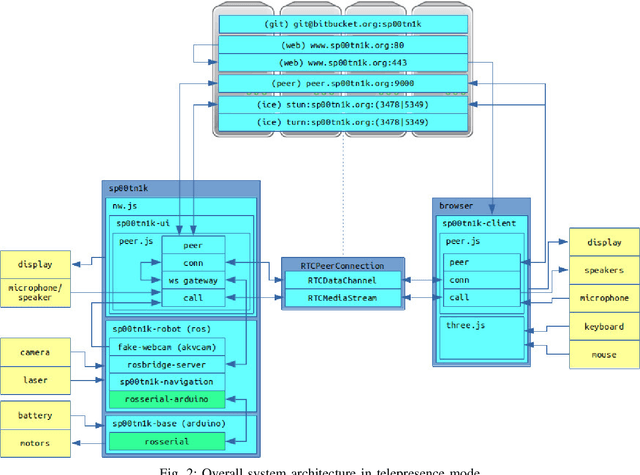
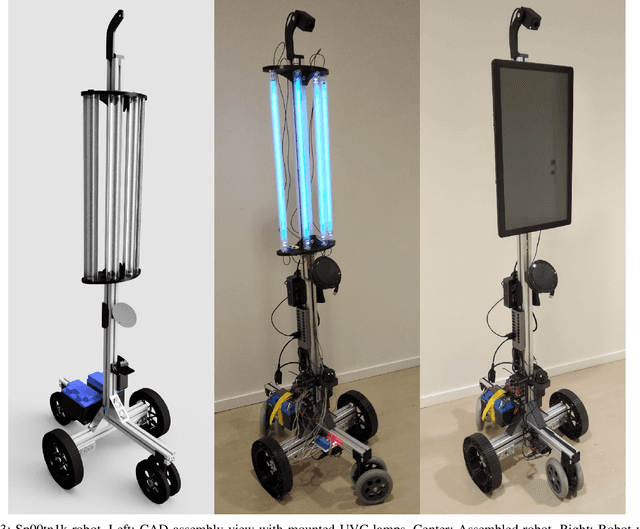
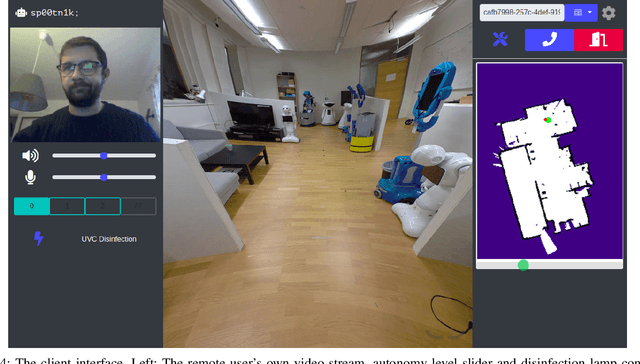
In a pandemic contact between humans needs to be avoided wherever possible. Robots can take over an increasing number of tasks to protect people from being exposed to others. One such task is the disinfection of environments in which infection spread is particularly likely or bears increased risks. It has been shown that UVC light is effective in neutralizing a variety of pathogens, among others the virus causing COVID-19, SARS-CoV-2. Another function which can reduce the need for physical proximity between humans is interaction via telepresence, i.e., the remote embodiment of a person controlling the robot. This work presents a modular mobile robot for telepresence and disinfection with UVC lamps. Both operation modes are supported by adaptable autonomy navigation features for facilitating efficient task execution. The platform's primary contributions are its hardware and software design, which combine consumer-grade components and 3D-printed mounting with open-source software frameworks.