 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvancing a taxonomy for proxemics in robot social navigation
Mar 19, 2025



Deploying robots in human environments requires effective social robot navigation. This article focuses on proxemics, proposing a new taxonomy and suggesting future directions through an analysis of state-of-the-art studies and the identification of research gaps. The various factors that affect the dynamic properties of proxemics patterns in human-robot interaction are thoroughly explored. To establish a coherent proxemics framework, we identified and organized the key parameters and attributes that shape proxemics behavior. Building on this framework, we introduce a novel approach to define proxemics in robot navigation, emphasizing the significant attributes that influence its structure and size. This leads to the development of a new taxonomy that serves as a foundation for guiding future research and development. Our findings underscore the complexity of defining personal distance, revealing it as a complex, multi-dimensional challenge. Furthermore, we highlight the flexible and dynamic nature of personal zone boundaries, which should be adaptable to different contexts and circumstances. Additionally, we propose a new layer for implementing proxemics in the navigation of social robots.
A Robotic Medical Clown : Forming a Design Space Model
May 09, 2023Medical clowns help hospitalized children in reducing pain and anxiety symptoms and increase the level of satisfaction in children's wards. Unfortunately, there is a shortage of medical clowns around the world. Furthermore, isolated children can not enjoy this service. This study explored the concept of a Robotic Medical Clown (RMC) and its role. We used mixed methods of elicitation to create a design space model for future robotic medical clowns. We investigated the needs, perceptions, and preferences of children and teenagers using four methods: interviewing medical clowns to learn how they perceive their role and the potential role of an RMC, conducting focus groups with teenagers, a one-on-one experience of children with a robot, and an online questionnaire. The concept of RMCs was acceptable to children, teenagers, and medical clowns. We found that the RMC's appearance affects the perception of its characters and role. Future work should investigate the interaction in hospitals.
Designing Socially Assistive Robots: Exploring Israeli and German Designers' Perceptions
Apr 30, 2023



Socially assistive robots (SARs) are becoming more prevalent in everyday life, emphasizing the need to make them socially acceptable and aligned with users' expectations. Robots' appearance impacts users' behaviors and attitudes towards them. Therefore, product designers choose visual qualities to give the robot a character and to imply its functionality and personality. In this work, we sought to investigate the effect of cultural differences on Israeli and German designers' perceptions and preferences regarding the suitable visual qualities of SARs in four different contexts: a service robot for an assisted living/retirement residence facility, a medical assistant robot for a hospital environment, a COVID-19 officer robot, and a personal assistant robot for domestic use. Our results indicate that Israeli and German designers share similar perceptions of visual qualities and most of the robotics roles. However, we found differences in the perception of the COVID-19 officer robot's role and, by that, its most suitable visual design. This work indicates that context and culture play a role in users' perceptions and expectations; therefore, they should be taken into account when designing new SARs for diverse contexts.
Designing robots with the context in mind -- One design does not fit all
Nov 08, 2022Robots' visual qualities (VQs) impact people's perception of their characteristics and affect users' behaviors and attitudes toward the robot. Recent years point toward a growing need for Socially Assistive Robots (SARs) in various contexts and functions, interacting with various users. Since SAR types have functional differences, the user experience must vary by the context of use, functionality, user characteristics, and environmental conditions. Still, SAR manufacturers often design and deploy the same robotic embodiment for diverse contexts. We argue that the visual design of SARs requires a more scientific approach considering their multiple evolving roles in future society. In this work, we define four contextual layers: the domain in which the SAR exists, the physical environment, its intended users, and the robot's role. Via an online questionnaire, we collected potential users' expectations regarding the desired characteristics and visual qualities of four different SARs: a service robot for an assisted living/retirement residence facility, a medical assistant robot for a hospital environment, a COVID-19 officer robot, and a personal assistant robot for domestic use. Results indicated that users' expectations differ regarding the robot's desired characteristics and the anticipated visual qualities for each context and use case.
Is it personal? The impact of personally relevant robotic failures on humans' trust, likeability, and willingness to use the robot
Jan 14, 2022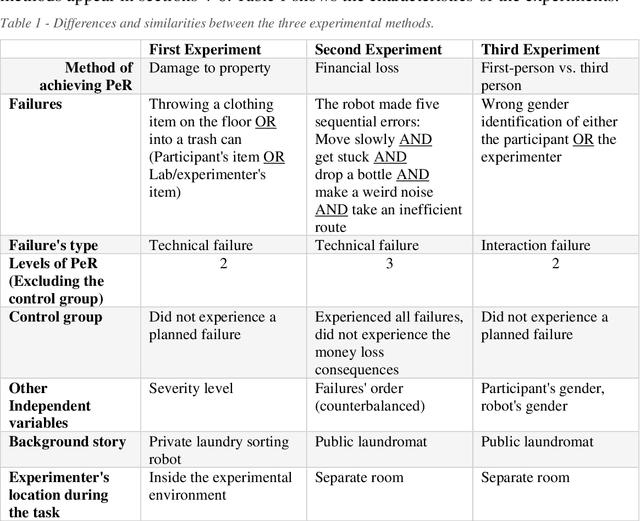
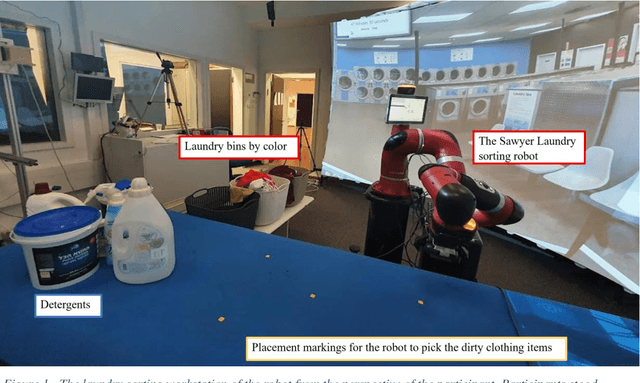
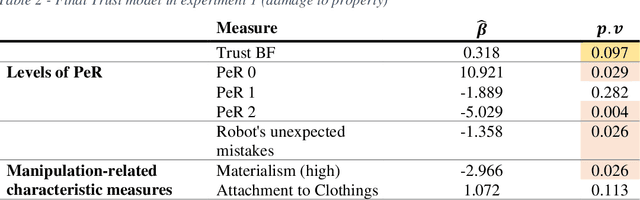
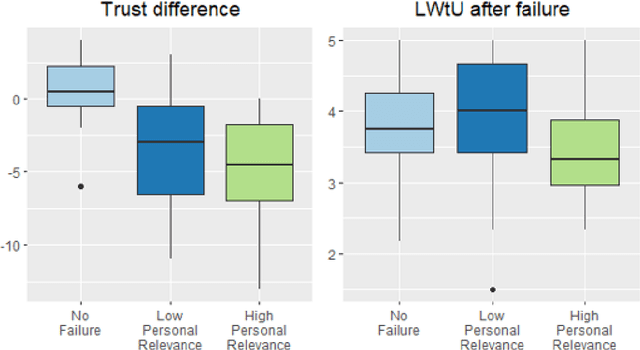
In three laboratory experiments, we examine the impact of personally relevant failures (PeRFs) on perceptions of a collaborative robot. PeR is determined by how much a specific issue applies to a particular person, i.e., it affects one's own goals and values. We hypothesized that PeRFs would reduce trust in the robot and the robot's Likeability and Willingness to Use (LWtU) more than failures that are not personal to participants. To achieve PeR in human-robot interaction, we utilized three different manipulation mechanisms: A) damage to property, B) financial loss, and C) first-person versus third-person failure scenarios. In total, 132 participants engaged with a robot in person during a collaborative task of laundry sorting. All three experiments took place in the same experimental environment, carefully designed to simulate a realistic laundry sorting scenario. Results indicate that the impact of PeRFs on perceptions of the robot varied across the studies. In experiments A and B, the encounters with PeRFs reduced trust significantly relative to a no failure session. But not entirely for LWtU. In experiment C, the PeR manipulation had no impact. The work highlights challenges and adjustments needed for studying robotic failures in laboratory settings. We show that PeR manipulations affect how users perceive a failing robot. The results bring about new questions regarding failure types and their perceived severity on users' perception of the robot. Putting PeR aside, we observed differences in the way users perceive interaction failures compared (experiment C) to how they perceive technical ones (A and B).
Using Online Customer Reviews to Classify, Predict, and Learn about Domestic Robot Failures
Jan 10, 2022
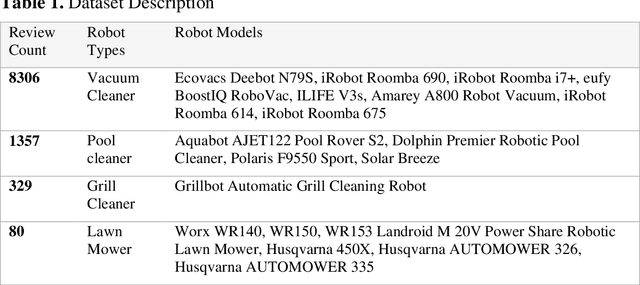
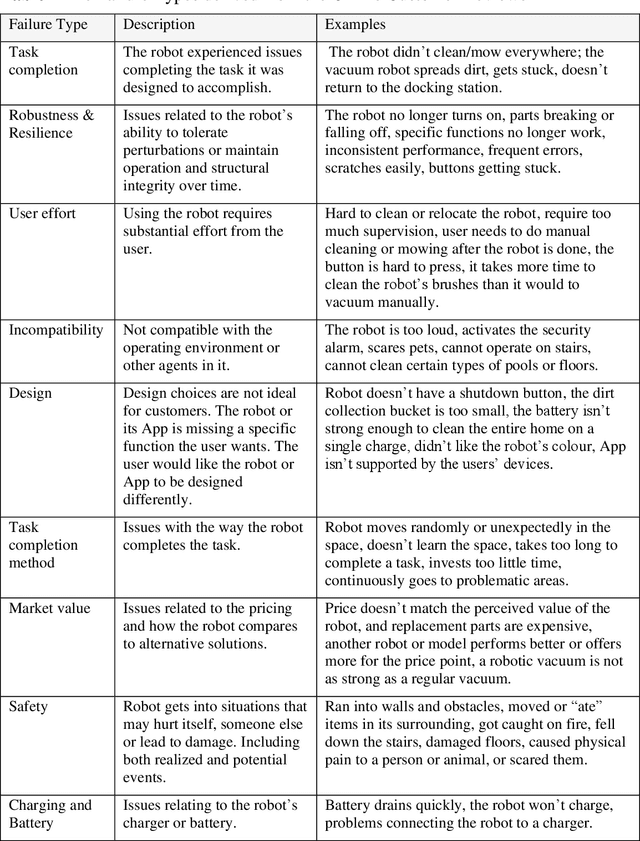
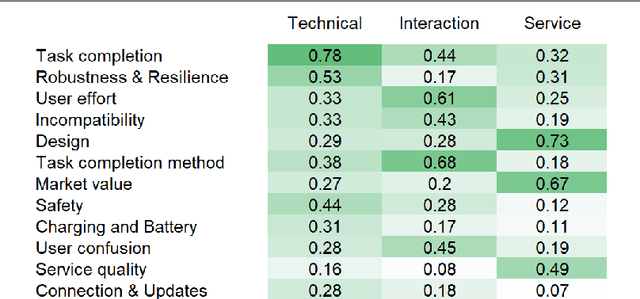
There is a knowledge gap regarding which types of failures robots undergo in domestic settings and how these failures influence customer experience. We classified 10,072 customer reviews of small utilitarian domestic robots on Amazon by the robotic failures described in them, grouping failures into twelve types and three categories (Technical, Interaction, and Service). We identified sources and types of failures previously overlooked in the literature, combining them into an updated failure taxonomy. We analyzed their frequencies and relations to customer star ratings. Results indicate that for utilitarian domestic robots, Technical failures were more detrimental to customer experience than Interaction or Service failures. Issues with Task Completion and Robustness & Resilience were commonly reported and had the most significant negative impact. Future failure-prevention and response strategies should address the technical ability of the robot to meet functional goals, operate and maintain structural integrity over time. Usability and interaction design were less detrimental to customer experience, indicating that customers may be more forgiving of failures that impact these aspects for the robots and practical uses examined. Further, we developed a Natural Language Processing model capable of predicting whether a customer review contains content that describes a failure and the type of failure it describes. With this knowledge, designers and researchers of robotic systems can prioritize design and development efforts towards essential issues.
Levels of Automation for a Mobile Robot Teleoperated by a Caregiver
Jul 21, 2021
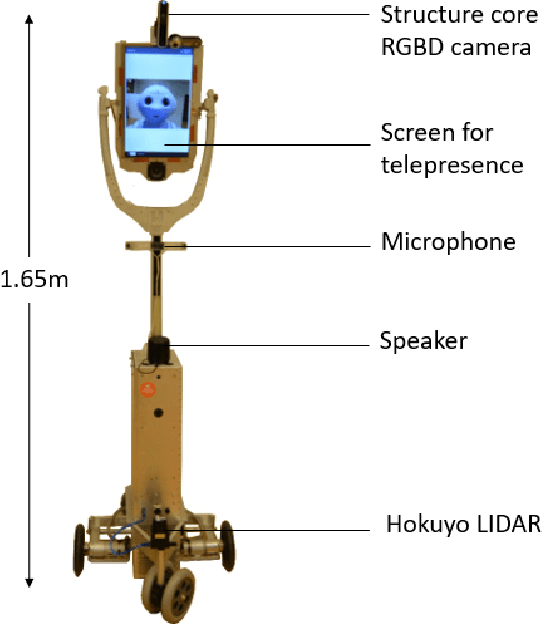
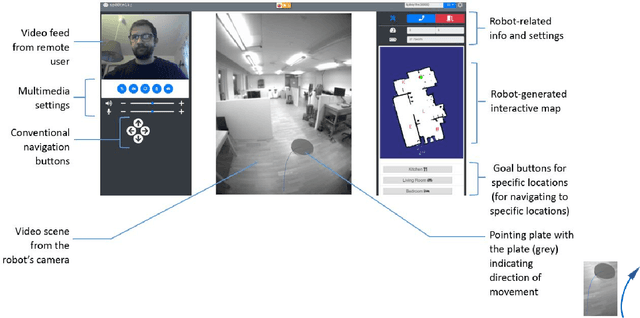
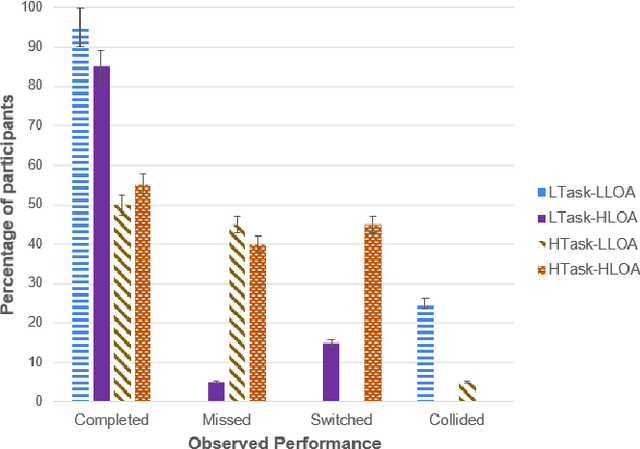
Caregivers in eldercare can benefit from telepresence robots that allow them to perform a variety of tasks remotely. In order for such robots to be operated effectively and efficiently by non-technical users, it is important to examine if and how the robotic system's level of automation (LOA) impacts their performance. The objective of this work was to develop suitable LOA modes for a mobile robotic telepresence (MRP) system for eldercare and assess their influence on users' performance, workload, awareness of the environment and usability at two different levels of task complexity. For this purpose, two LOA modes were implemented on the MRP platform: assisted teleoperation (low LOA mode) and autonomous navigation (high LOA mode). The system was evaluated in a user study with 20 participants, who, in the role of the caregiver, navigated the robot through a home-like environment to perform various control and perception tasks. Results revealed that performance improved at high LOA when the task complexity was low. However, when task complexity increased, lower LOA improved performance. This opposite trend was also observed in the results for workload and situation awareness. We discuss the results in terms of the LOAs' impact on users' attitude towards automation and implications on usability.
User-centered Feedback Design in Person-following Robots for Older Adults
Mar 24, 2021
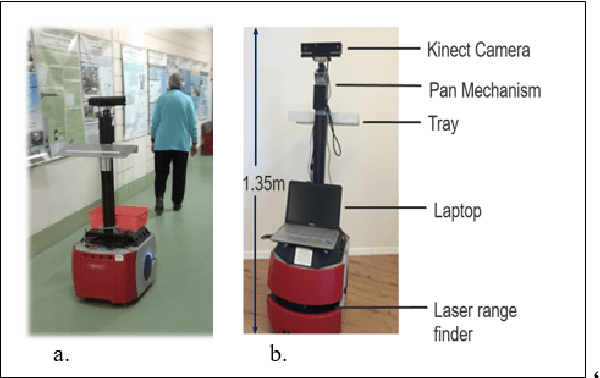
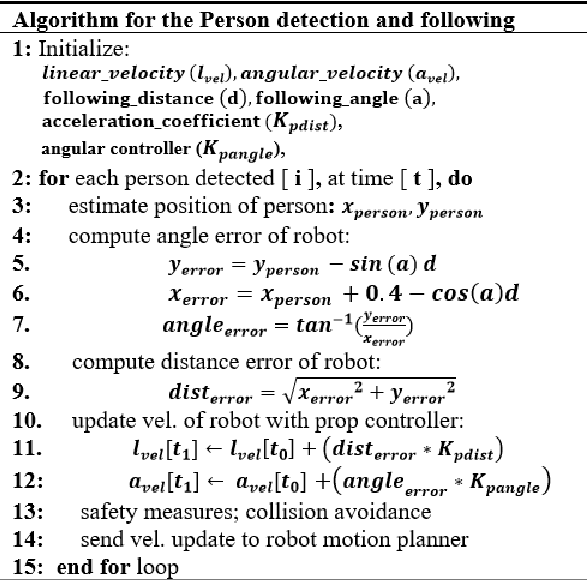
Feedback design is an important aspect of person-following robots for older adults. This paper presents a user-centred design approach to ensure the design is focused on the needs and preferences of the users. A sequence of user studies with a total of 35 older adults (aged 62 years and older) was conducted to explore their preferences regarding feedback parameters for a socially assistive person-following robot. The preferred level of robot transparency and the desired content for the feedback was first explored. This was followed by an assessment of the preferred mode and timing of feedback. The chosen feedback parameters were then implemented and evaluated in a final experiment to evaluate the effectiveness of the design. Results revealed that older adults preferred to receive only basic status information. They preferred voice feedback overtone, and at a continuous rate to keep them constantly aware of the state and actions of the robot. The outcome of the study is a further step towards feedback design guidelines that could improve interaction quality for person-following robots for older adults.
Improving the interaction of Older Adults with Socially Assistive Robots for Table setting
Mar 24, 2021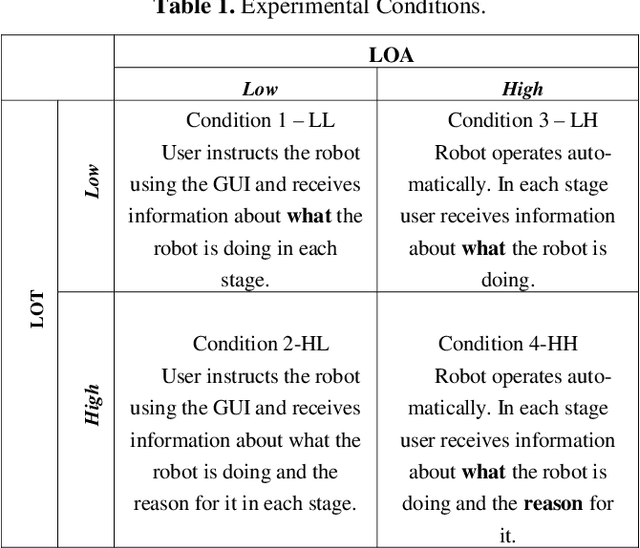
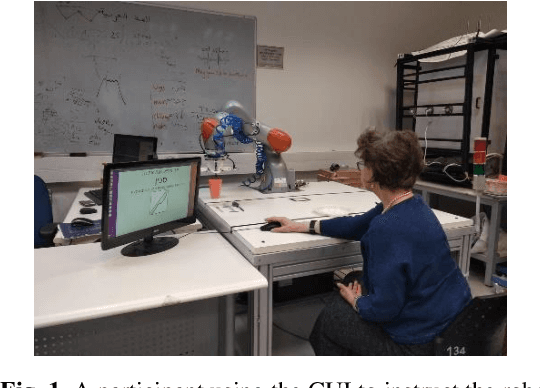
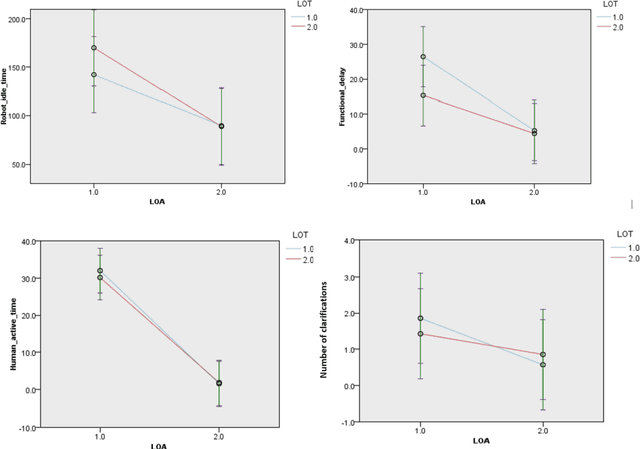
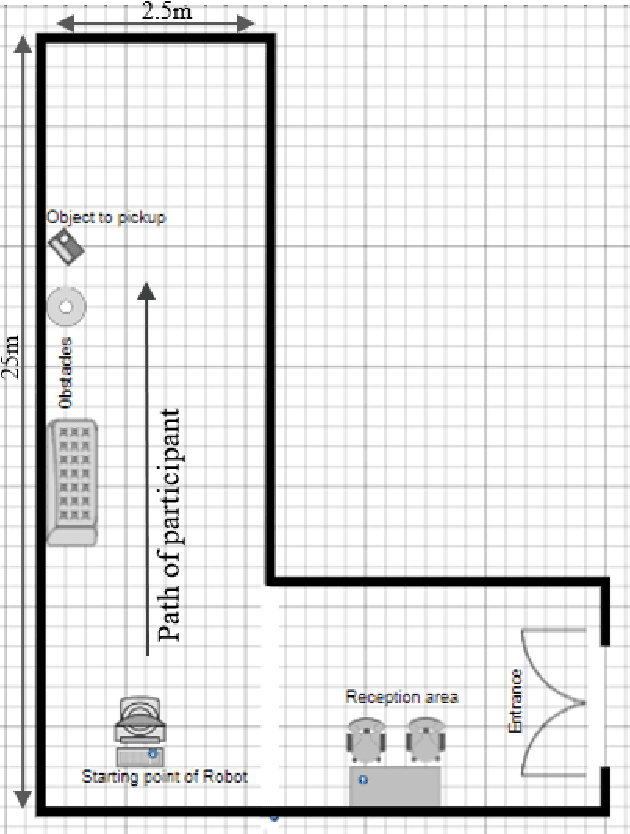
This study provides user-studies aimed at exploring factors influencing the interaction between older adults and a robotic table setting assistant. The in-fluence of the level of automation (LOA) and level of transparency (LOT) on the quality of the interaction was considered. Results revealed that the interaction effect of LOA and LOT significantly influenced the interaction. A lower LOA which required the user to control some of the actions of the robot influenced the older adults to participate more in the interaction when the LOT was low com-pared to situations with higher LOT (more information) and higher LOA (more robot autonomy). Even though the higher LOA influenced more fluency in the interaction, the lower LOA encouraged a more collaborative form of interaction which is a priority in the design of robotic aids for older adult users. The results provide some insights into shared control designs which accommodates the preferences of the older adult users as they interact with robotic aids such as the table setting robot used in this study.